意在给截瘫患者一些行动的自由,从而改善他们的生活质量脑-机接口(BCIS)测量该人的大脑活动并将电流转换为控制信号神经调节剂.“由思想控制”,Gernot Müller-Putz将其简化为。格拉茨理工大学(TU Graz)神经工程研究所所长是BCI研究的“老手”,并积极参与非侵入性BCI系统的研究。
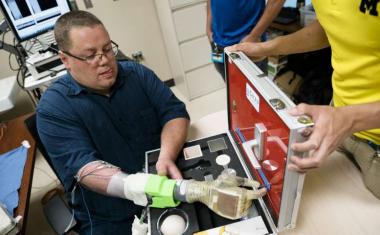
他和他的团队已经取得了基于脑电图的神经假体控制的初步积极结果机械手臂在过去的十年中,在脊髓受伤的人中。然而,直到现在,控制是不自然的和繁琐的,因为思想模式必须多次想象。作为他最近完成的ERC Consolidator Grant项目的一部分,Müller-Putz和他的团队现在已经在更自然和连续的BCI控制系统的发展方面取得了突破。
广告

广告

这一切都归结于看
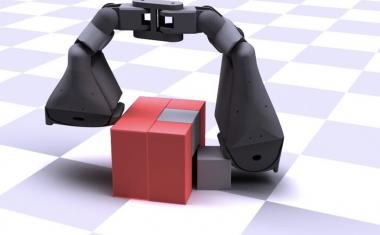
格拉茨理工大学的研究人员首次成功地使用脑电图帽,通过常规的非侵入性方式,通过思维实时控制机械臂。这是通过解码大脑信号中的连续运动意图而实现的——这在以前是不可能的。研究人员首先检查了各种运动参数,如位置、速度和距离,并从神经元活动中提取出它们的相关性。Müller-Putz说:“眼睛的作用在这里至关重要。”“让用户用眼睛跟踪机械手臂的轨迹,这一点很重要。”
然而,眼睛运动和眼睛眨眼产生了自己的电信号,所谓的脑电图。“这些人工制品扭曲了脑电图信号。因此,它们必须实时删除。然而,必须发生眼睛手动协调,从而有助于对运动请求的解码,”Müller-Putz解释说。换句话说,视觉信息有助于捕捉到移动的意图。然而,眼睛本身的不需要的信号必须算法差异地滤出电活动。
推荐的文章

思想控制的神经调节剂:Moregrasp项目
更好地掌握事物:MoreGrasp Horizon2020研究项目即将结束,在思想控制的抓取神经修复术领域取得了重大成果。大规模的可行性研究正在进行中。
BCI检测不需要的运动
由研究人员开发的BCIS之一也能够识别一个人是否想要开始运动 - 它可以识别面向目标的运动的开始。此外,另一个研究团队的BCIS检测并纠正错误,即机器人手臂的不需要的运动;再次拼图以获得更自然的假体控制。“大脑的误差响应可以从脑电图读出。BCI认识到所执行的运动与该人的意图不相符。它停止了机器人手臂的运动或将其重置为开头,”Müller-Putz说。在该项目中,错误检测在脊髓受伤人员的测试中成功测试了多次。
人们可以感受到机器人手臂的动作
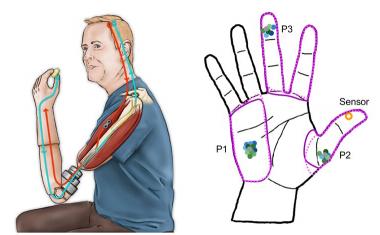
TU Graz研究人员也取得了成功,所谓的Kinaesthetic反馈。“参与者不仅看到假肢的运动,他们也会感受到他们,”一个明显高兴的Müller-Putz说。从技术上讲,在振动传感器的帮助下,这是可能的。它们粘在肩胛骨上的皮肤上,并跟踪机器人臂的运动在细流的振动中。从理论上讲,完全瘫痪的人也可以感受到运动。“然而,我们必须考虑在这里的颈部区域的应用程序,”Müller-Putz说,未来的目标。首先是研究人员希望改善从视觉,故意和动力学信息的移动的解码,从而检测错误并在“四重BCI系统”中的所有四个BCI系统的错误。
来源:涂格拉茨