该项目源于几年内与临床医生的对话。共识是机器人通过提供用品和材料,最好地帮助急诊科的医生、护士和工作人员。但这意味着机器人必须知道如何避免临床医生忙于照顾重病患者的情况。
“为了执行这些任务,机器人必须了解复杂的医院环境的背景和周围的人员,”Laurel Riek教授在UC San Diego举行的计算机科学和紧急医学中。
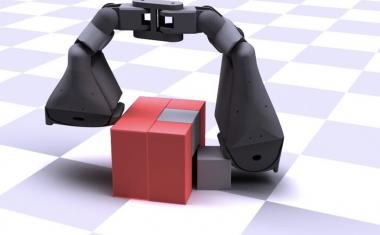
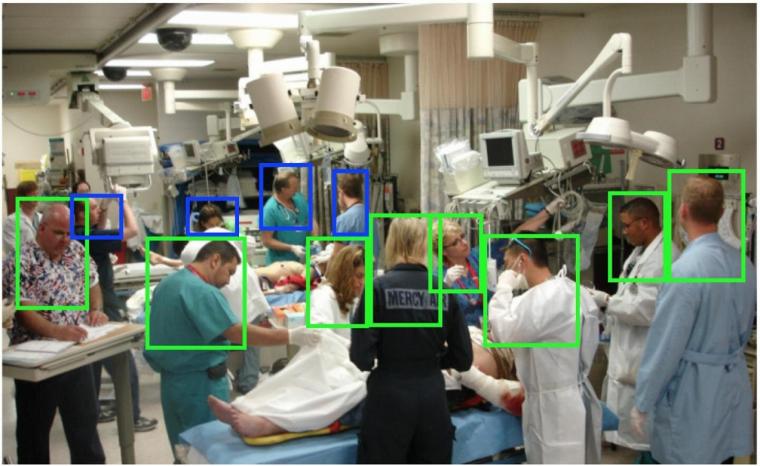
博士生Angelique Taylor和他的同事们围绕一个机器人建造了一个导航系统——安全临界深度q网络(SafeDQN)算法这是考虑到有多少人聚集在一个空间,以及这些人移动的速度和突然程度。这是基于对急诊科临床医生行为的观察。当病人病情恶化时,一队人会立即聚集在他们周围提供帮助。临床医生的动作迅速、灵敏、准确。的导航系统指示机器人围绕这些聚类的人群移动,避开。
“我们的系统旨在处理在ED中可能发生的最坏情况的情况,”泰勒说,泰勒是瑞克医疗保健机器人实验室的一部分,位于计算机科学与工程系的UC San Diego系。
广告

广告

该团队利用YouTube上的视频训练算法,这些视频大多来自纪录片和真人秀,比如《创伤:急诊室生活》(Trauma: Life in The ER)和《波士顿急救》(Boston EMS)。这组超过700个视频可供其他研究团队训练其他算法和机器人。
研究人员在模拟环境中测试了他们的算法,并将其性能与其他最先进的机器人导航系统进行了比较。在所有情况下,SafeDQN系统生成了最有效和最安全的路径。
接下来的步骤包括在一个真实的环境中,在一个物理机器人上测试系统。Riek和他的同事们计划与加州大学圣地亚哥分校健康研究人员合作,这些研究人员负责运营校园的医疗培训和模拟中心。这种算法也可以在急诊室之外使用,例如在搜索和救援任务中。
该研究小组在一份报告中详细介绍了他们的发现纸在中国西安的西安5月30日至6月5日举行的机器人和自动化国际会议。
来源:加州大学圣地亚哥分校