机器人如何判断多干净是“干净”
新加坡科技设计大学(SUTD)的研究人员对触摸和检查方法进行了智能升级,为自主清洁机器人设计了一种传感器,可以量化给定区域的清洁度。
多年来,打扫卫生机器人已从家庭中发现的圆盘形吸尘器演变为先进的模型,可以导航机场和火车站等复杂空间。作为新冠肺炎强调保持公共空间清洁的必要性,我们如何确保清洁机器人所覆盖的区域确实清洁?
人们确定一个表面是否干净的一种方法是触摸和视觉检查。虽然这可能适用于餐桌或家庭地板,但对于大型公共空间并不总是实用或安全的。这种方法的另一个问题是标准化,这提出了一个基本问题:“干净”到底有多干净?
新加坡科技与设计大学(SUTD)的研究人员在国家机器人项目的支持下,试图解决这种模糊性,使用自主机器人,有效和系统地确定一个地区的清洁度。他们的研究成果发表在《科学》杂志上,其中包括一个可被机器人用来评估清洁程度的新框架和一种探索策略传感器。
“目前,没有标准估计清洁干净清洁,”第一次作者Thejus Pathmakubar先生,Sutd博士学生。“这项研究代表了我们迈向A的第一步机器人解决方案。”
广告

广告

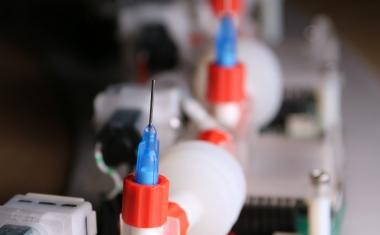
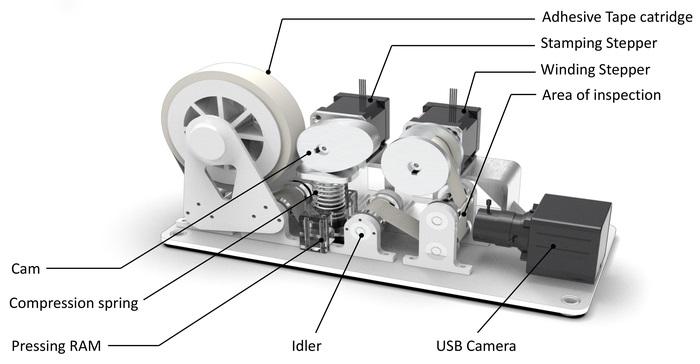
从触摸和检查的方法中获得灵感,该团队设计了一个传感器,将白色胶带压在地板上,并扫描胶带中的灰尘颗粒。通过测量胶带被压前和压后的照片之间的不同程度,研究小组得出了一个可以分配到该区域的污垢分数。该传感器还可以计算出胶带照片上与污垢相对应的像素数,从而了解该地区的污垢密度。
“通过这种传感器,使用触控和检测类别为一个区域分配污垢分数,我们需要做的是,下一步是设计可以”触摸“一个巨大区域的机器人”,“路径说。
推荐的文章

9个消毒机器人对抗冠状病毒
被SARS-CoV-2污染的表面对工作人员和患者的安全构成严重威胁。为了最大限度地降低工作人员的风险,医院正在使用消毒机器人对表面进行消毒。
一种策略是让机器人漫游到处,检查该地区的每个角落和裂缝。但是PathMakumar注意到这种方法效率低下,因为一些区域可能具有更高的浓度累积污垢,而其他区域可能不会。
为了使探索更智能,Pathmakumar和同事编写了一个程序算法这将鼓励机器人探索更有可能是脏的区域。他们的污垢概率驱动算法促使机器人注意到地板上可能显示污垢的视觉模式的变化,之后机器人将被引导进入该区域的中心。
为了补充这种策略,该团队还使用了前沿探索算法,以便机器人优先考虑未开发的区域。“前沿探索算法通常用于搜索和救援等应用中,”Pathmakumar表示。“我们修改了这个算法,以便在机器人仍然有动力移动到前沿移动,如果它看到具有高污垢概率的区域,它将首先去那里。”
推荐的文章

基于来自触摸和检查方法的数据,机器人量化了一个区域的清洁度,在0到100之间的清洁基准得分,得分更靠近100对应于更清洁的表面。
该团队在室内和半户外区域的混合中测试了清洁审计机器人。他们的测试表明后者的基准分数较低,因为具有粗糙纹理的区域使灰尘颗粒不易被胶带抬起。不同楼层纹理之间的过渡还促使机器人错误地检测污垢,表明未来的改进方面。
SUTD的助理教授Mohan Rajesh Elara解释说:“在这项工作中,我们专注于机器人用于审计清洁度的视觉和触觉方面。”他是该项目的首席研究员,也是机器人公司Lionsbot的联合创始人。“未来,我们将全面审核清洁质量,不仅考虑视觉和触觉方面,还考虑嗅觉方面和微生物密度。”
推荐的文章

asst与清洁行业和新加坡国家环境局密切合作的伊拉拉教授表示,他们的清洁审计系统可以以模块化格式出现。这样,它可以制成人类经理使用的手持设备,或者集成到即使清洁时审核清洁度的机器人。
“在可重构机器人领域,SUTD被Web of Science评为世界第一,这是全球机器人研究的基准,”助理教授埃拉拉说。“我认为这项工作是清洁机器人领域的下一个前沿,而SUTD在这方面处于领先地位。”
来源:新加坡科技设计大学