机器人这些精巧的设备可以做很多事情。机器人可以跳舞,可以上下楼梯,成群的无人机可以独立编队飞行,这只是其中的几个例子。然而,所有这些机器人在很大程度上都是经过编程的——不同的情况或模式已经预先植入它们的大脑,它们受到中央控制,或者一个复杂的计算机网络教会它们行为机learning.巴斯·奥弗维尔德(Bas Overvelde)是AMOLF软机器人物质小组的首席研究员,他想要回到最基本的东西:一个尽可能简单的自学习机器人。“最终,我们希望能够使用由简单的积木构建的自学习系统,例如,只由一种材料如聚合物组成。我们也将这些称为机器人材料。”
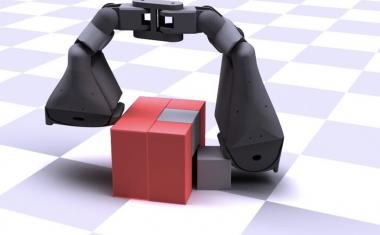
研究人员成功地获得了非常简单的、相互连接的机器人车,它们在轨道上移动,以学习如何在某个方向上尽可能快地移动。这些车不需要编程路线,也不知道其他机器人车在做什么。“这是一种设计自学习机器人的新思路。与大多数传统的编程机器人不同,这种简单的自学习机器人不需要任何复杂的模型来使其适应强烈变化的环境,”Overvelde解释道。“在未来,这可能会在软机器人技术中得到应用,比如学会如何捡起不同物体的机械手,或者在受到伤害后自动适应其行为的机器人。”
广告

广告

呼吸的机器人
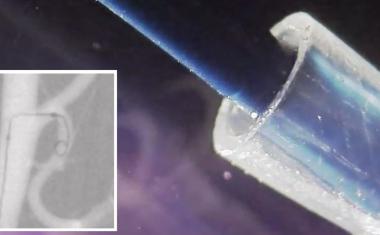
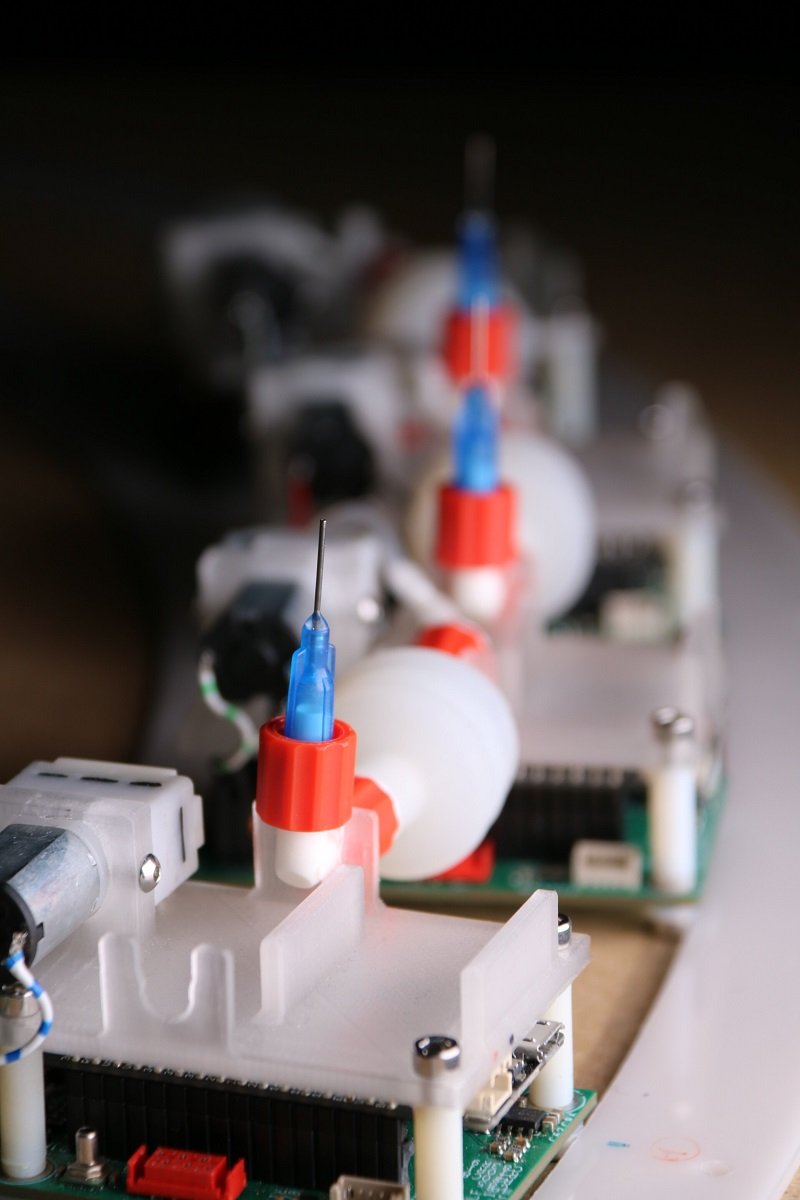
这个自学习系统由几个几厘米大小的独立机器人组成。这些机器人由一个微控制器(一台微型计算机)、一个运动传感器、一个将空气抽进风箱的泵和一根放空空气的针组成。可以说,这种组合使机器人能够呼吸。如果你用第一个机器人的风箱连接第二个机器人,它们会互相推开。这就是整个机器人火车能够移动的原因。“我们想让机器人尽可能的简单,这就是为什么我们选择了风箱和空气。许多柔软的机器人用这种方法,”博士生Luuk van Laake说。
研究人员事先要做的唯一一件事就是用几行计算机代码(简短的代码)告诉每个机器人一套简单的规则算法):每隔几秒钟开关一次泵——这叫做循环——然后尽可能快地朝某个方向移动。机器人上的芯片持续测量速度。每隔几个周期,机器人就会对水泵何时开启进行小的调整,并确定这些调整是否能使机器人列车更快地向前移动。因此,每个机器人车都在不断地进行小实验。
如果你让两个或两个以上的机器人以这种方式互相推拉,火车迟早会朝一个方向移动。因此,机器人知道这是更好的设置为他们的泵,而不需要沟通,也不需要精确的编程如何前进。系统慢慢地优化自己。与文章一起发布的视频展示了火车是如何缓慢但平稳地沿着圆形轨迹移动的。
应对新情况
研究人员使用了两个不同版本的算法,看看哪个更好。第一个算法保存了机器人的最佳速度测量值,并以此来决定泵的最佳设置。第二种算法仅使用最近的速度测量值来确定每个循环中泵启动的最佳时刻。后一种算法要好得多。它可以在没有预先设定好的情况下处理这些情况,因为它不会浪费时间在过去可能很好的行为,但在新的情况下不再这样做。例如,它可以迅速克服轨迹上的障碍,而用其他算法编程的机器人会陷入停顿。Overvelde说:“如果你能找到正确的算法,那么这个简单的系统就非常健壮。”“它可以应对一系列意想不到的情况。”
假腿
无论它们多么简单,研究人员都认为这些机器人已经有了生命。在其中一个实验中,他们想破坏一个机器人,看看整个系统是如何恢复的。“我们去掉了充当喷嘴的针头。这感觉有点奇怪。就好像我们在扯它的腿一样。”在这种情况下,机器人也会调整自己的行为,以便火车再次朝正确的方向移动。这再次证明了该体系的稳健性。
该系统易于扩展;研究人员已经成功制造出一列由7个机器人组成的移动列车。下一步是制造能进行更复杂行为的机器人。“一个这样的例子就是章鱼一样的构造,”Overvelde说。“观察单个的积木是否会像章鱼的手臂一样运动是很有趣的。它们也有分散的神经系统,一种独立的大脑,就像我们的机器人系统。”
研究结果发表在PNAS.
来源:AMOLF