Tiny bubbles help create soft robotics
普林斯顿研究人员发明了泡沫铸造,一种使用空气膨胀时以可预测的方式改变形状的“花式气球”来制造软机器人的新方法。

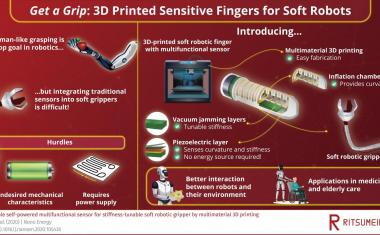
The new system involves injecting bubbles into a liquid polymer, letting the material solidify and inflating the resulting device to make it bend and move. The researchers used this approach to design and create hands that grip, a fishtail that flaps and slinky-like coils that retrieve a ball. They hope that their simple and versatile method will accelerate the development of new types of软机器人.
Traditional rigid机器人have multiple uses, such as in manufacturing cars. "But they will not be able to hold your hands and allow you to move somewhere without breaking your wrist," said Pierre-Thomas Brun, an assistant professor of chemical and biological engineering and the lead researcher on the study. "They're not naturally geared to interact with the soft stuff, like humans or tomatoes."
Soft robots使用Squishier,柔性材料,使其可适用于需要温和触摸的应用。他们可能有一天用于收获生产,从传送带上抓住细腻物品或提供个人护理。它们也可能在医疗保健中有用,例如穿戴exosuits.for rehabilitation or implantable devices that wrap around the heart to help it beat.
Advertisement

Advertisement

One challenge in designing soft robots is controlling how they stretch and deform, which dictates how they move. All robots have components that cause movement, called actuators. Unlike rigid robots that move in fixed ways depending on their joints, the materials in soft robots have the potential to move and expand in an infinite number of ways.
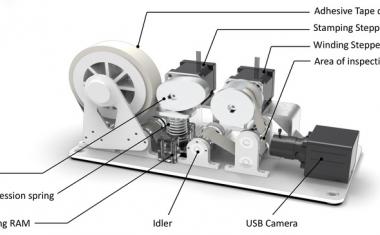
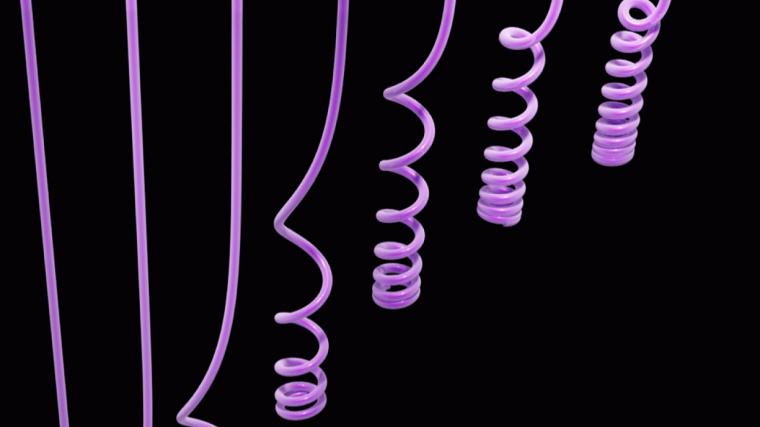
泡沫铸造提供了一种简单、灵活的create actuators for soft robots using basic rules of fluid mechanics—the physics of fluids. The method uses a liquid polymer called elastomer, which cures to become a rubbery, elastic material. It is injected into a mold as simple as a drinking straw or a more complex shape, like a spiral or flipper. Next, the researchers inject air into the liquid elastomer to create a long bubble throughout the length of the mold. Thanks to gravity, the bubble slowly rises to the top as the elastomer drains to the bottom. Once the elastomer hardens, it can be removed from the mold and inflated with air, which causes the thin side with the bubble to stretch and curl in on the thicker base.
通过控制少数因素 - 弹性体涂覆模具的厚度,弹性体沉淀到底部的速度以及治愈所需的时间 - 研究人员可以决定所得到的执行器如何移动。换句话说,“流体力学正在进行工作”,“布伦说。
"If it's allowed more time to drain before curing, the film at the top will be thinner. And the thinner the film, the more it will stretch when you inflate it and cause greater overall bending," explained first author Trevor Jones, a graduate student in chemical and biological engineering.
研究人员成功地扮演了星形的“手”,轻轻地抓住黑莓手机,一个像肌肉一样合同的线圈,甚至一组“手指”,因为整个系统膨胀一个逐个卷曲,仿佛踢钢琴。
用空气膨胀时,本文中的致动器变形,但其他软机器人系统采用磁场,电场或温度或湿度的变化。
这项工作的大部分是弄清楚机器人一旦膨胀就如何表现出来,以便研究人员可以设计具有特定运动的软执行器。CO-Author Etienne Jambon-Puillet是Brun集团的博士后研究员,与琼斯合作,开发了系统的计算机仿真。
"We can predict what will happen using a simple equation that anyone can use," said Jambon-Puillet. "We understand quite well now what happens when we inflate these tube-like materials."
泡沫铸件的主要优点是它不需要3D打印机,激光切割器或通常用于软机器人中的昂贵工具。系统也是可扩展的。它有可能产生几米长的致动器,具有薄的特点为100微米 - 几乎小于人的头发。
“真正的聪明是这种想法,旨在通过天然流体运动来塑造结构,”瑞士洛桑·洛安·洛安·斯岛的普通动力学教授FrançoisGallaire说,他没有参与研究。“这些过程将在许多不同的尺度上工作,包括非常小的东西。这很令人兴奋,因为用典型的制造方法铸造这些管可能真的很困难,所以有可能制造非常小的管。”
尽管它的灵活性,泡沫铸件确实有其限制。到目前为止,研究人员已经成功地迫使泡沫迫使泡沫的填充管道迫使泡沫。此外,溢出可能导致气球流行。“失败是相当灾难性的,”琼斯说。
Next, the group will use their system to create more complex actuators and explore new applications. They are interested in designing actuators that move together in sequential waves, like the rippling feet of a walking millipede. Another possibility is creating actuators with chambers that alternately contract and relax using a single pressure source to inflate them, mimicking the beating of the human heart.
“我们能听懂and this problem at a physics level pretty strongly," said Jones, "so now the robotics can really be explored."
The research was published inNature.
Source:普林斯顿大学