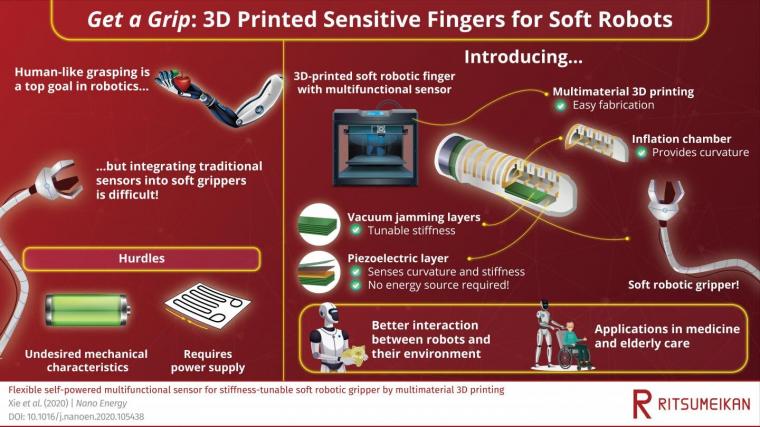
虽然机器人机器已经重塑甚至重新定义了许多工业部门,在健康和老年护理等领域,机器和人类之间仍然存在着差距。为机器人为了安全地操作或与易碎的物体和活的有机体互动,我们需要新的策略来增强它们的感知能力,同时使它们的部件变得更柔软。事实上,制造一种安全、灵巧、具有类人能力的机器人抓手是目前机器人技术最重要的目标之一。
设计的主要挑战之一柔软的机器人Grippers将传统传感器集成到机器人的手指上。理想情况下,柔软的抓爪应该具有所谓的本体感——对自身动作和位置的感觉——以便能够安全地执行各种任务。然而,传统的传感器是刚性的,损害了软件的力学特性。此外,现有的软爪通常设计为单一类型的本体感觉;无论是压力还是手指弯曲。
广告

广告

为了克服这些限制,日本立命馆大学的科学家们在谢孟英副教授的带领下,一直致力于新型软爪的设计。他们的最新研究发表在纳米能量,他们成功地使用了multimmaterial新利18官方制造内置本体感知传感器的软机器人手指的技术。他们的设计策略提供了许多优势,代表着向更安全、更有能力的软机器人迈出了一大步。
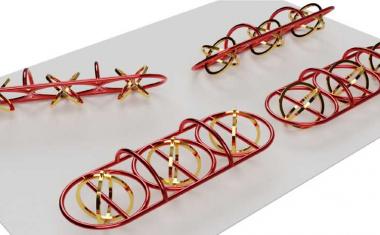
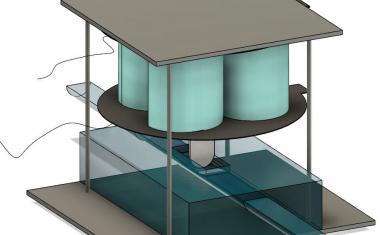
柔软的手指具有一个增强的充气室,使其根据输入的空气压力以高度可控的方式弯曲。此外,手指的刚度也可以通过在一个单独的房间中创造一个真空来调节。这是通过一种称为真空干扰的机制实现的,通过吸出可弯曲材料之间的空气,可以使多层堆叠的材料变硬。这两个功能结合在一起,使三指机器人夹持器能够通过确保施加必要的力,正确地抓住和保持任何物体。
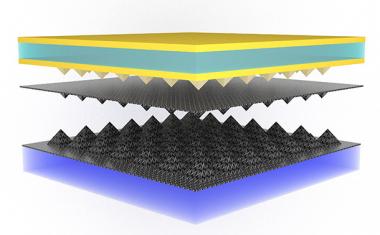
然而,最值得注意的是这一单压电在真空干扰层中加入一层作为传感器。当材料受到压力时,压电效应会产生电压差。科学家们利用这一现象作为机器人手指的传感机制,提供了一种简单的方法来感知其曲率和初始刚度(在真空调节之前)。他们进一步提高了手指的灵敏度,在干扰层之间包括一个微结构层,以改善压电材料上的压力分布。
使用多材料3D打印技术,一种简单快速的原型制作过程新利18官方,使得研究人员可以轻松地将传感和刚度调节机制集成到机器人手指本身的设计中。“我们的工作提出了一种设计传感器的方法,这种传感器不仅可以作为机器人应用的传感元件,还可以作为活性功能材料,在不影响系统动态行为的情况下,更好地控制整个系统,”谢教授表示。他们设计的另一个显著特点是,传感器可以由压电效应自供电,这意味着它不需要能量供应,这对低功耗应用是必不可少的。
总的来说,这项令人兴奋的新研究将帮助未来的研究人员找到新的方法,改善柔软的抓握器如何与被操纵的物体互动和感知。反过来,这将极大地扩大机器人的用途,正如谢教授所指出的那样:“自供电的内置传感器不仅将使机器人能够安全地与人类及其环境进行互动,而且还将消除目前依赖于供电传感器监测情况的机器人应用的障碍。”
来源:立命馆大学