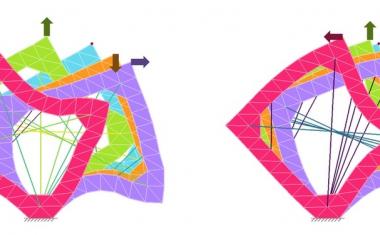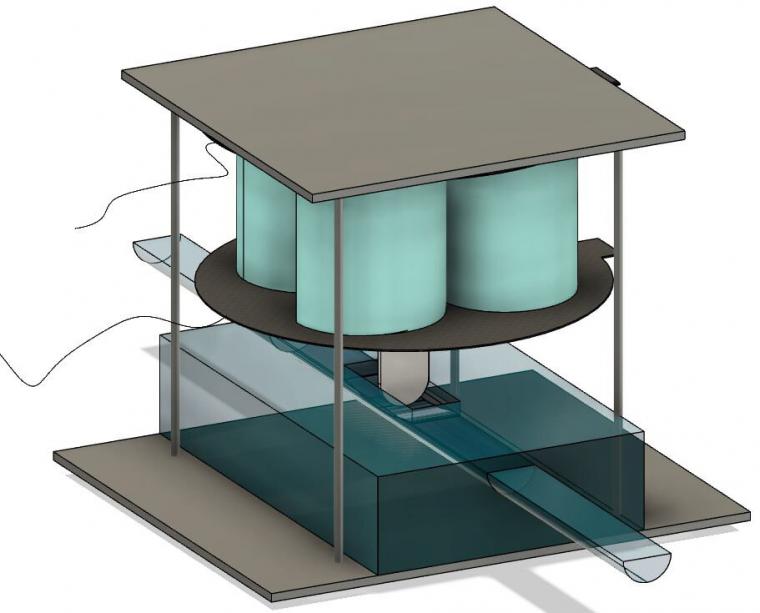
一个组装的软动力DEA阀。
资料来源:Siyi Xu / Harvard Seas
10.09.2021•
下一代软机器人的组件
哈佛大学约翰·a·保尔森工程与应用科学学院(SEAS)的科学家们已经开发出一种软阀门,为全软机器人铺平了道路。
软机器人由加压液驱动可以探索新的边界,并以传统的刚性的方式与微妙的物体相互作用机器人不能。但制造完全柔软的机器人仍然是一个挑战,因为驱动这些设备的许多组件本身是刚性的。
现在,来自哈佛John A.Paulson工程学院的研究人员和应用科学(SEAR)开发了电动驱动的软阀,以控制液压软阀门。这些阀门可用于辅助和治疗装置,生物启发的软机器人,柔软的夹具,手术机器人, 和更多。
海洋工程与应用科学学院的Harry Lewis和Marlyn McGrath工程与应用科学教授Robert J. Wood说:“今天僵化的调节系统极大地限制了流体驱动的软机器人的适应性和灵活性。”“在这里,我们开发了控制软液压执行器的软、轻量化阀门,为未来流体软机器人的机载软控制开辟了可能性。”
广告

广告

软阀并不是什么新产品,但到目前为止,还没有一个能达到许多现有液压执行器所要求的压力或流量。为了克服这些限制,该团队开发了新型电动介质弹性体执行器(DEAs)。这些软执行器具有超高的功率密度,重量轻,可运行几十万次。该团队将这些新型介质弹性体驱动器与软通道结合在一起,形成了用于流体控制的软阀门。
“这些软阀具有快速的响应时间,能够控制流体压力和流量,以满足液压执行器的需求,”该论文的第一作者、SEAS研究生徐思毅(Siyi Xu)说。“这些阀门为我们提供了快速、强大的宏小规模液压执行器控制,内部体积从数百微升到几十毫升不等。”
使用DEA软阀门,研究人员证明了不同卷的液压执行器的控制,并实现了由单个压力源供电的多个执行器的独立控制。“这种紧凑型轻型的DEA阀能够对液压执行器的前所未有的电气控制,显示软流体驱动机器人的未来运动控制的可能性,”徐说。
该研究发表在国家科学院的诉讼程序中(PNA.)。
来源:哈佛大学