定制软机器人的通用方法
通过将两种不同的方法结合到一个集成的工作流程中,新加坡科技设计大学(SUTD)的研究人员开发了一种新的自动化流程,用于设计和制造定制的软机器人。他们的方法可以应用于其他类型的软机器人——允许它们的机械特性以一种可访问的方式进行定制。
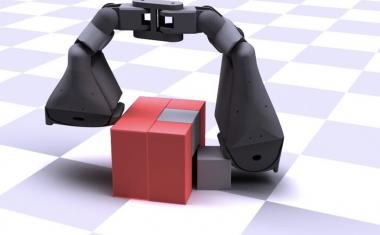
虽然机器人常被描述为刚性的金属结构,一种新兴的柔韧机器称为柔软的机器人正在迅速获得牵引力。受到生物体灵活形式的启发,柔软的机器人广泛应用于传感、运动、物体抓取和操纵等领域。然而,这样的机器人仍然主要是通过手工铸造技术制造的,这限制了其复杂性和可实现的几何形状。
该研究的负责人、SUTD助理教授Pablo Valdivia y Alvarado说:“由于缺乏标准工具,大多数制作方法主要是手工制作。”“但新利18官方或加法制造正慢慢地发挥作用,因为它促进了可重复性,允许更复杂的设计,提高了质量和性能。”
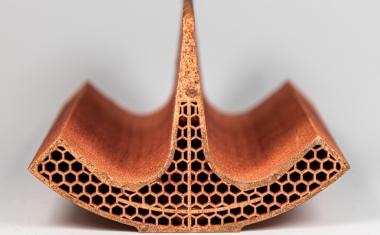
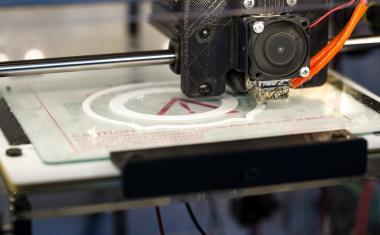
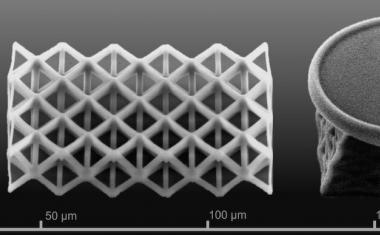
瓦尔迪维亚·阿尔瓦拉多博士表示,嵌入式3D打印技术——将各种材料油墨挤压在一个支撑矩阵中——新利18官方特别适合制造由多种材料或复合材料制成的软机器人。然而,为了确保这些机器人是最优化设计的,该团队转向了拓扑优化(to),即使用数学模型在一组约束条件下设计定制的结构。
广告

广告

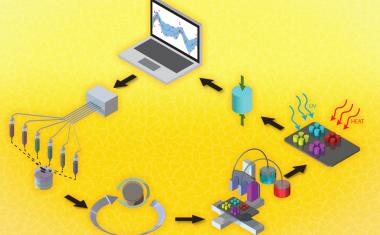
通过在单一框架中自动化这两个关键步骤,作者希望开发出一个集成的工作流来创建定制的软机器人,并在此过程中将潜在的错误降到最低。在这项研究中,研究小组使用了一种受蝙蝠状动物启发的自主游泳机器人。工作流首先定义机器人鳍的几何形状,然后使用TO在指定的材料和运动约束下生成所需的结构和所需的属性。然后,优化后的设计被转化为代码,由该团队定制的3D打印机读取,然后再制造机器人。
这种受蝙蝠体启发的软体机器人是为了在海洋环境的恶劣条件下生存而设计的,该方法专注于调整它们的鳍组成,并评估这些变化将如何影响制造出来的机器人的游泳性能。
具体来说,设计了三种类型的鳍片——两个鳍片分别由软材料和硬材料制成,以及通过TO将两种材料结合设计的第三个鳍片。与前两个翼片使用传统方法制作不同,第三个复合翼片是按照集成工作流制作的。
令人难以置信的是,采用优化复合鳍的软机器人比采用传统铸造软鳍的机器人快50%,速度略高于硬鳍机器人。同样的原型,与软鳍相比,旋转速度快30%,在三个机器人中有最小的转弯半径,使其在水中的机动能力更好。
Valdivia y Alvarado博士成功地证明了他们的方法的有效性,他指出,他们制造优化的多材料软机器人的工作流程可以普遍应用于设计其他软机器人。
瓦尔迪维亚·阿尔瓦拉多博士说:“例如,如果我们正在建造一个传感器,我们在TO中的目标可能是调整结构某些部分的电导率。”“定制光学、热学、电学以及其他物理化学性质也会在其他应用领域引起兴趣。”
这项研究发表在先进材料技术.
来源:新加坡科技设计大学