磁场控制微型机器人
新加坡南洋理工大学(NTU Singapore)的科学家们已经开发出毫米大小的机器人,可以通过磁场控制,进行高度可操作性和灵巧的操作。这为将来在生物医学和制造业的应用铺平了道路。
研究团队创造了微型机器人通过将磁性微粒嵌入生物相容性聚合物 - 无毒材料对人类无害。在应用磁场时,机器人将“编程”以执行其所需功能。
ntu制造的机器人改进了许多现有的小型机器人,通过优化它们的六个自由度(DoF)移动能力,即沿着三个空间轴的平移运动和围绕这三个轴的旋转运动,通常称为滚、俯仰和偏航角。
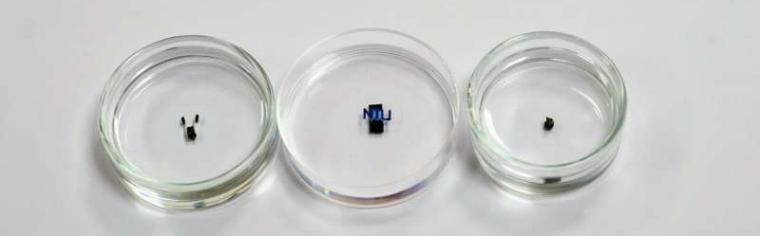
虽然研究人员以前创造了六个DOF微型机器人在精确控制方向的情况下,新型微型机器人在关键六自由度上的旋转速度是普通机器人的43倍。它们也可以用“柔软”的材料制成,因此可以复制重要的机械特性——一种可以像水母一样“游泳”,另一种具有抓握能力,可以精确地挑选和放置微型物体。
该研究的领导作者,助理教授Lum Guo Zhan从机械和航天工程学院表示,导致团队成就的关键因素躺在发现这些磁场的“难以捉摸”的第三和最终主要的载体。对控制这种机器至关重要。
相比之下,以往的研究只是用两个主向量来定义外加磁场。
“通过这项工作,我的团队试图揭示具有六自由度运动的微型机器人的基本工作原理。通过充分了解这些微型机器人的物理特性,我们现在能够精确地控制它们的运动。此外,我们提出的制造方法可以磁化这些机器人产生比其他现有设备大51到297倍的六自由度力矩。因此,我们的发现至关重要,它们代表了小型机器人技术的重大进步。”助理教授解释道。
广告

广告

机器人通过障碍物游泳,组装结构
在实验室实验中,研究小组展示了微型机器人的灵活性和速度。
用一个海蜇受启发的机器人,南洋理工大学的团队展示了它是如何在悬浮在水中时快速游过障碍物的一个狭窄开口的。这个演示是非常重要的,因为它表明,这些机器人能够谈判障碍动态和不确定的环境中,这可能是一个非常理想的能力为他们的目标在未来生物医学应用在手术等重要器官,如大脑难以到达的。
展示精确取向控制,微型机器人还记录了每秒173度的转速,其六分行运动,超过现有的微型机器人已经实现的最快旋转,这对于六个DOF运动是每秒四度。
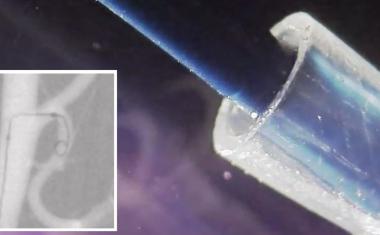
通过他们的机器人抓手,科学家们能够在不到5分钟的时间内组装出一个由两个y形高跷上的一根杆组成的3D结构,这比现有微型机器人的速度快了大约20倍。这组研究人员说,这种概念验证论证表明,有一天它们可能会被用于制造微型设备的“微型工厂”。
提供一个独立的观点,来自NTU学校的杰出大学教授华建高教授,以及对美国机械工程师帝申科勋章的着名2021年美国机械工程师协会的收件人表示,“这是工程植物的工程学植物深刻的科学理解有助于我们发展先进机器人为了人类的利益。这项研究工作可以在许多领域产生深远的影响,从小说手术方法到未来制造业的小规模装配过程。”
该研究发表于先进材料。
来源:南洋科技大学