生物混合机器人的新领域涉及到在机器人中使用活组织,而不仅仅是金属和塑料。肌肉是这种机器人的一个潜在的关键组成部分,提供运动和功能的驱动力。然而,在努力将活体肌肉整合到这些机器上的过程中,这些肌肉所能发挥的力量以及它们开始收缩并失去功能之前的时间都存在问题。
现在,东京大学工业科学研究所的研究人员已经克服了这些问题,他们开发了一种新方法,从单个的肌肉前体细胞,到充满肌肉细胞的薄片,然后到完全功能的骨骼肌组织。他们将这些肌肉整合到一个生物混合机器人中,作为对抗性的对,模仿身体中的肌肉,实现了显著的机器人运动和持续一周以上的肌肉功能。
该团队首先构建了一个机器人骨骼,在其上安装了一对功能肌肉。这包括一个可旋转的关节,肌肉可以附着的锚点,以及提供刺激诱导肌肉收缩的电极。对于机器人的活肌肉部分,该团队没有提取并使用身体中完全成形的肌肉,而是从零开始建造了一块。为此,他们使用了含有肌肉前体细胞(称为成肌细胞)的水凝胶薄片,孔将这些薄片附着在机器人的骨骼锚上,以及条纹以鼓励肌肉纤维以对齐的方式形成。
该研究的通讯作者Shoji Takeuchi说:“一旦我们建立了肌肉,我们就成功地将它们作为机器人的对抗对,一个收缩,另一个扩张,就像在身体上一样。”“就像之前的研究一样,它们互相施加相反的力量,阻止了它们的收缩和恶化。”
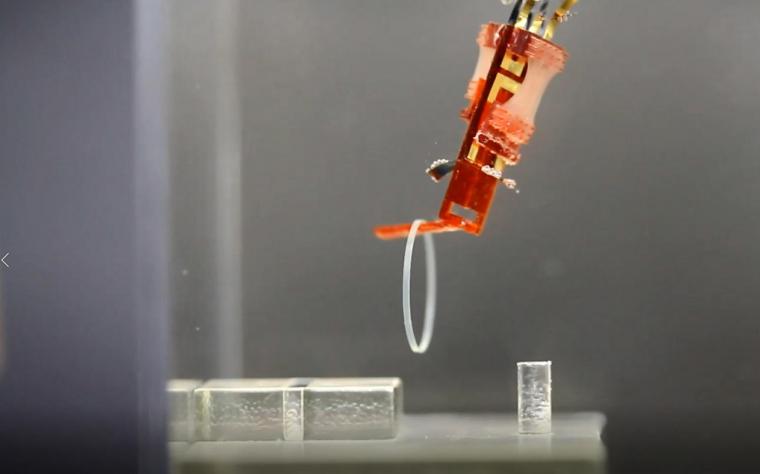
该团队还在不同的应用中测试了机器人,包括让一个机器人拿起和放置一个环,以及让两个机器人一起工作来拿起一个方形框架。结果表明,机器人可以很好地完成这些任务,肌肉的激活会导致机器人末端一个手指状突起弯曲约90度。
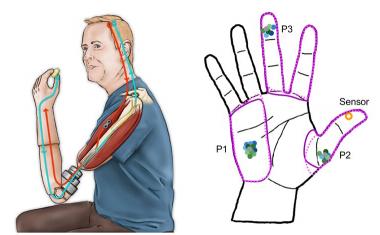
“我们的发现表明,利用这种肌肉的对抗排列,这些机器人可以模仿人类手指的动作,”第一作者Yuya Morimoto说。“如果我们能将更多这样的肌肉组合到一个设备中,我们就能重现复杂的肌肉相互作用,让手、手臂和身体其他部位发挥功能。”
广告

广告

来源:东京大学工业科学研究所