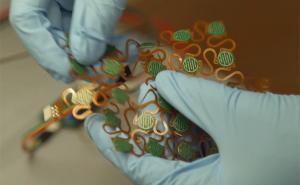
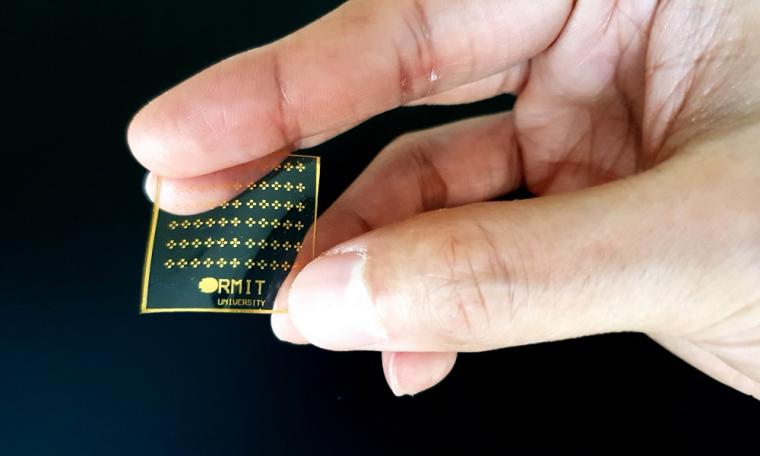
RMIT大学的一个团队开发的原型设备可以电子复制人类皮肤感知疼痛的方式。该设备模拟了身体的即时反馈反应,并能以与神经信号传输到大脑相同的光速对疼痛感觉作出反应。
首席研究员Madhu Bhaskaran教授说,这种疼痛感知模型是下一代机器人的重大进步生物医学技术和智能技术机器人.Bhaskaran说:“皮肤是我们身体最大的感觉器官,具有复杂的特征,当有任何伤害时,它会发出快速的警告信号。”“我们一直通过皮肤感觉到东西,但我们的疼痛反应只有在特定的点才会发生,比如当我们触摸太热或太尖锐的东西时。迄今为止,还没有任何电子技术能够真实地模拟人类的痛感。我们的人造皮肤在压力、热或冷达到疼痛阈值时立即做出反应。这是未来精密反馈系统发展的关键一步,我们需要提供真正智能的反馈系统假肢和智能机器人”。
广告

广告

功能感测原型
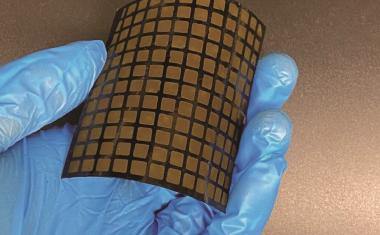
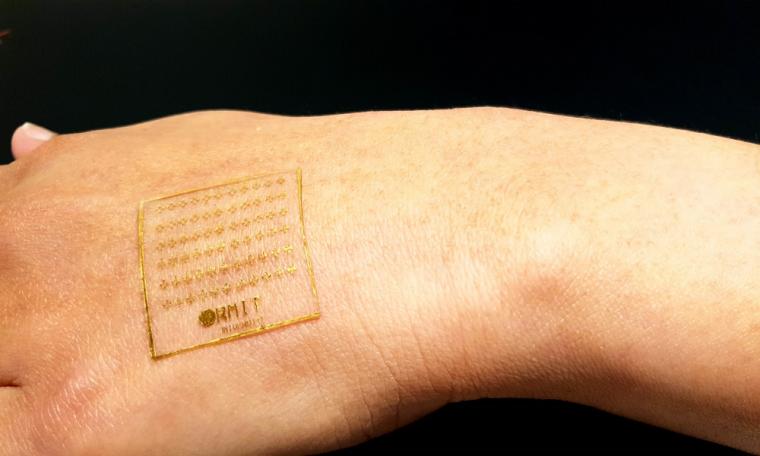
除了疼痛感知原型,研究团队还开发了可伸缩电子设备,可以感知和响应温度和压力的变化。RMIT功能材料和微系统小组的共同领导Bhaskaran说,这三个功能原型的设计是为了以电子形式传递皮肤传感能力的关键特性。
随着进一步的发展,可伸缩的人造皮肤也可能成为未来的非侵入性选择皮肤移植物在传统方法不可行或不起作用的地方。Bhaskaran说:“我们需要进一步的发展,将这种技术整合到生物医学应用中,但是基本的技术——生物相容性和皮肤的可伸缩性——已经具备了。”
压力传感器原型结合了可拉伸的电子产品和长期存储器单元,热传感器带来温度反应性涂层和记忆,而疼痛传感器集成了所有三种技术。
PHD研究员MD Atraur Rahman表示,当压力,热或疼痛达到设定阈值时,每个原型中的存储器单元都负责触发响应。“我们基本上创造了第一家电子躯体传感器 - 复制身体复杂的神经元系统,神经途径和受体的关键特征,这引起了对感官刺激的看法,”他说。“虽然一些现有技术使用电信号来模仿不同水平的疼痛,但这些新设备可以对真正的机械压力,温度和疼痛做出反应,并提供正确的电子响应。这意味着我们的人造皮肤知道用手指轻轻触摸别针或不小心刺伤自己的差异 - 这是从未在电子之前实现的致命区别。“
来源:皇家墨尔本理工大学