人体皮肤是一种迷人的多功能器官,其独特的特性源于其柔韧的天性。它允许通过与神经系统相连的众多受体与外部物理环境连接。科学家们一直试图将这些特征转移到人造皮肤很长一段时间,瞄准机器人应用。的操作机器人系统严重依赖于空间定位和定向所需的电子和磁场传感功能。大量的研究和开发已经投入到以灵活和兼容的形式实现这些功能。柔性传感器和有机电子学的最新进展提供了重要的前提条件。这些设备可以在柔软和有弹性的表面上工作,而传感器感知各种物理特性并通过读出电路传输它们。
然而,为了紧密复制自然皮肤,需要将大量的单个传感器连接起来。这一具有挑战性的任务成为实现电子皮肤的主要障碍。最初的演示是基于一组单独处理的传感器,这不可避免地导致了大量的电子连接。为了减少必要的布线,必须完成一个重要的技术步骤。也就是说,复杂的电子电路,如移位寄存器、放大器、电流源和开关必须与单独的磁传感器结合,以实现完全集成的设备。
广告

广告

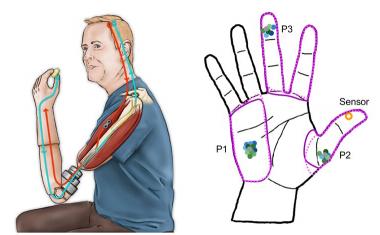
来自德累斯顿、开姆尼茨和大阪的研究人员可以在一种开创性的有源矩阵磁传感器系统中克服这一障碍。该传感器系统由2 × 4的磁传感器阵列、有机自举移位寄存器(用于控制传感器矩阵)和有机信号放大器组成。其特点是所有的电子元件都是基于有机薄膜晶体管,并集成在一个单一的平台中。研究表明,该系统具有较高的磁灵敏度,能够实时获取二维磁场分布。它也非常坚固的机械变形,如弯曲,折痕或扭结。除了完整的系统集成,有机引导移位寄存器的使用是向机器人和可穿戴应用的有源矩阵电子皮肤发展的非常重要的一步。
德国德累斯顿莱布尼兹固体和材料研究所主任Oliver G. Schmidt教授和Daniil Karnaushenko博士介绍了下一步:“我们的第一个集成磁功能证明薄膜柔性磁传感器可以集成在复杂的有机电路中。这些设备的超柔顺性和灵活性是现代和未来应用不可或缺的功能,如软机器人,植入物和假肢。下一步是增加每个表面面积的传感器数量,并扩大电子皮肤以适应更大的表面。”