细胞操纵——将小颗粒从一个地方移动到另一个地方——是许多科学研究的组成部分。操纵细胞的一种方法是通过光电镊(OET),它利用各种光模式直接与感兴趣的物体相互作用。
由于这种直接的相互作用,可以应用的力和细胞材料可以被操纵的速度是有限制的。这就是微型机器人的应用变得有用的地方。
由博士后张帅龙博士和亚伦·惠勒教授领导的研究团队,已经设计了微型机器人(工作在亚毫米尺度),可以由OET操作细胞操作。
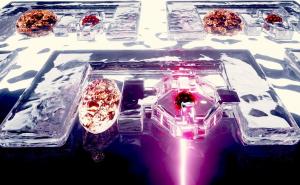
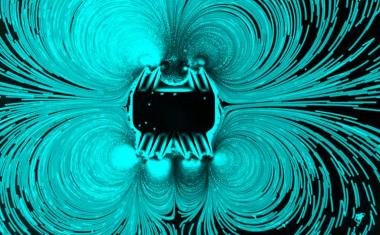
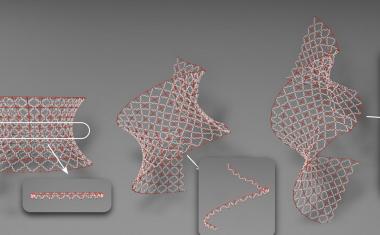
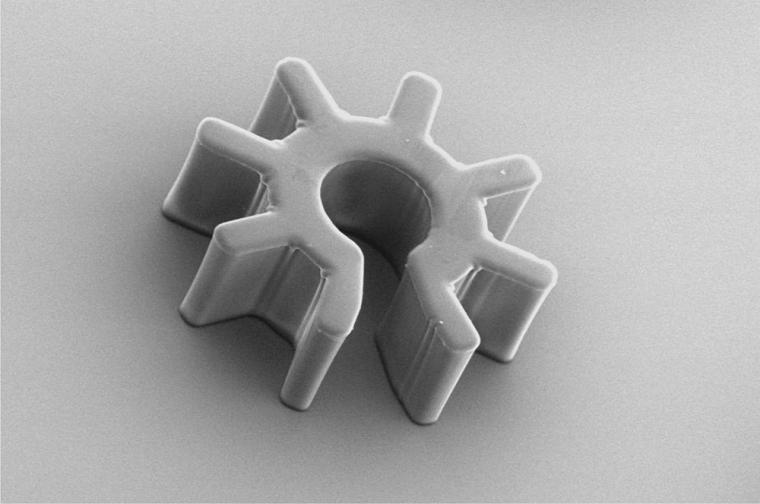
光不是直接与细胞相互作用,而是用来引导齿轮形状的微型机器人,这些机器人可以“舀起”细胞材料,运输它,然后传递它。与传统OET方法相比,这种操作可以在更快的速度下完成,同时对材料造成的损害更小。“这些光驱动的微型机器人能够在复杂的生物环境中进行非侵入性、精确的控制、分离和分析细胞的能力,使它们成为一个非常强大的工具,”张说。“传统的操作单个细胞的技术,在显微镜下评估它们是缓慢和繁琐的,需要大量的专业知识来进行,”化学系教授惠勒说,他曾在生物材料和生物医学工程研究所(IBBME)和唐纳利细胞和生物分子研究中心担任交叉职务。“但这些微型机器人价格低廉,使用非常简单,在生命科学和其他领域有广泛的应用。”
除了细胞分析,微型机器人还可以用于细胞分选(用于克隆扩展)、RNA测序和细胞-细胞融合(通常用于抗体的生产)。
Cindi Morshead是IBBME和外科学的教授,也是解剖学的主席,她是这项研究的合著者。Morshead在Donnelly中心的实验室里,她在再生医学方面的研究与驻留在大脑和脊髓中的神经干细胞有关。Morshead说:“神经干细胞在它们的生态位中对大量的线索和环境刺激做出反应,这些信号和细胞反应随着损伤而改变,所以当我们试图利用干细胞进行神经修复时,梳理这些信号和细胞反应是一个巨大的挑战。”“这些微型机器人可以对细胞及其微环境进行精细控制,这是我们需要了解如何最好地激活干细胞的工具。”
广告

广告

来源:多伦多大学