机器人的实时健康监测和传感能力需要软电子技术,但使用这种材料的挑战在于其可靠性。与刚性设备不同的是,具有弹性和柔韧性使得它们的性能不易重复。这种可靠性上的变化称为迟滞现象。
在接触力学理论的指导下,新加坡国立大学的一组研究人员提出了一种新的传感器材料,其迟滞显著减少。这种能力使更精确的可穿戴健康技术和机器人传感成为可能。
广告

广告

低滞后压力传感器
当软材料用作压缩传感器时,它们通常面临严重的滞后问题。软传感器的材料特性会在多次触摸之间发生变化,从而影响数据的可靠性。这使得每次获得准确的读数具有挑战性,限制了传感器的可能应用。
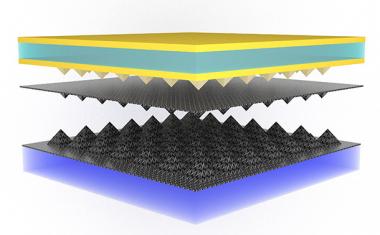
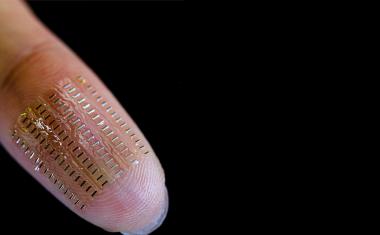
新加坡国立大学研究小组的突破在于发明了一种材料,它具有高灵敏度,但几乎没有磁滞。他们开发了一种方法,在一种叫做聚二甲基硅氧烷(PDMS)的柔性材料上,将金属薄膜破裂成理想的环形图案。
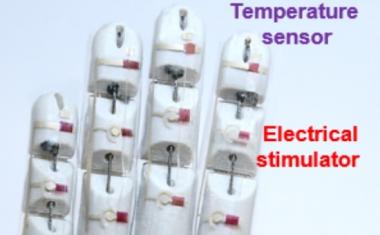
该团队将该金属/ PDMS薄膜与电极和基板集成,用于压阻传感器,并表征其性能。他们进行了重复的机械测试,并验证了他们的设计创新改善了传感器性能。他们的发明是,名为触觉环形裂纹的E-SINS或痕量的触觉,比传统软材料更好五倍。“通过我们独特的设计,我们能够实现显着提高的准确性和可靠性。迹线传感器可能用于机器人,以感知表面纹理或可穿戴健康技术装置,例如,测量健康监测应用中的浅表动脉中的血流“Benjamin Tee从Nus卫生创新技术研究所说.
下一步
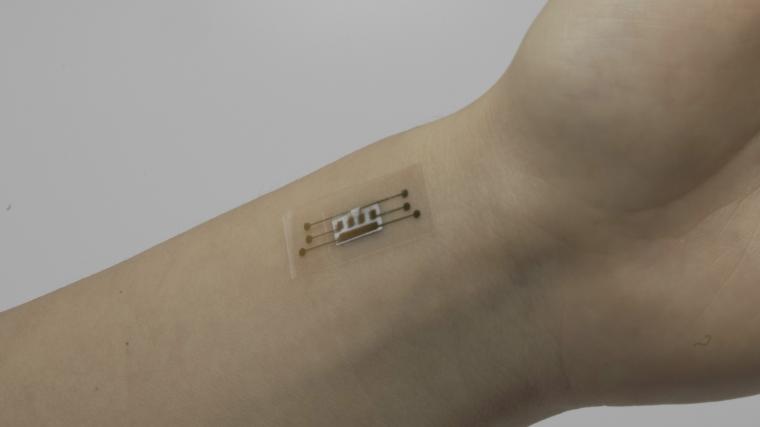
NUS团队的下一步是进一步提高其材料对不同可穿戴应用的形式性,并基于传感器开发人工智能(AI)应用。“我们的长期目标是以一种在人体皮肤上放置的微小智能贴片的形式预测心血管健康。该跟踪传感器是对该现实前进的一步,因为它可以捕获脉冲速度的数据更准确,并且也可以配备机器学习算法,以更准确地预测表面纹理,“Asst Prof Tee解释说明。
其他应用程序Nus团队旨在开发的旨在在假肢中的用途包括用于假肢的使用,其中具有可靠的皮肤界面允许更智能的响应。
这项研究发表在美国国家科学院院刊.
来源:新加坡国立大学