就像我们的听觉和视觉一样,触觉在我们如何感知和与周围的世界互动中扮演着重要的角色。能够复制我们触觉的技术——也被称为触觉反馈——可以极大地增强医疗康复和虚拟现实等应用程序的人机界面。
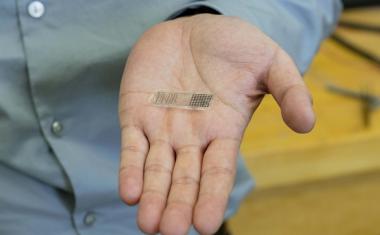
EPFL的可重构机器人实验室(RRL)的科学家们,由杰米·白(Jamie Paik)领导,软生物电子接口实验室(LSBI),由工程学院的Stéphanie拉库尔(Stéphanie Lacour)领导,已经合作开发了一种由硅树脂和电极制成的柔软、灵活的人造皮肤。
皮肤的软传感器和致动器系统使人造皮肤能够符合佩戴者手腕的确切形状,并以压力和振动的形式提供触觉反馈。应变传感器持续测量皮肤的变形,从而可以实时调整触觉反馈,以产生尽可能真实的触感。“这是我们首次开发出一种完全柔软的人造皮肤,其中集成了传感器和驱动器,”该研究的主要作者哈沙尔·声纳(Harshal Sonar)说。“这为我们提供了闭环控制,这意味着我们可以准确、可靠地调节用户感受到的振动刺激。这对于可穿戴应用来说非常理想,比如在医疗应用中测试病人的本体感觉。”
广告

广告


触觉夹在硅胶层之间
这种人造皮肤含有柔软的气动执行器,它们形成一层薄膜,可以通过向其中泵入空气来膨胀。执行器可以调整到不同的压力和频率(高达100hz,或每秒100次脉冲)。当薄膜层迅速膨胀和收缩时,皮肤会振动。传感器层位于膜层之上,包含由液固镓混合物制成的软电极。这些电极持续测量皮肤的变形,并将数据发送到微控制器,微控制器利用反馈微调传递给穿戴者的感觉,以响应穿戴者的运动和外部因素的变化。
这种人造皮肤可以被拉伸到原来长度的四倍,周期可达100万次。这使得它对许多现实世界的应用程序特别有吸引力。目前,科学家们已经在用户的手指上进行了测试,并仍在对这项技术进行改进。
Sonar公司表示:“下一步将是开发一种应用于康复、虚拟现实和增强现实的完全可穿戴原型。”“原型机还将在神经科学研究中进行测试,研究人员在磁共振实验中研究动态大脑活动时,它可以用来刺激人体。”