3D渲染图像的新假肢旋转扔球。
资料来源:Göttingen大学
该论文的高级作者、帝国理工学院生物工程系的达里奥·法里纳教授说:“在设计仿生肢体时,我们的主要目标是让患者像控制自己的生物肢体一样自然地控制它们。”这项新技术让我们离实现这一目标又近了一步。”
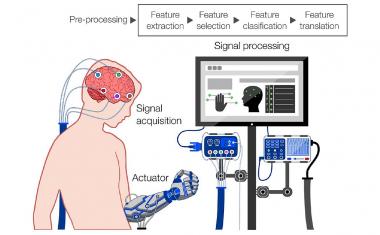
目前的技术是通过几个肌肉信号来直接控制假体马达。这种新型仿生手是与帝国理工大学和Göttingen大学合作开发的,它使用一个人机界面,可以解释病人的意图,并向假肢发送指令。它包含8个电极,可以从病人的残肢接收微弱的电信号,然后将其放大并发送到一个微型计算机上,这个微型计算机也安装在假体中。
广告

广告

微型计算机然后运行机器学习算法来解释信号,然后命令手的马达按病人希望的方式移动。患者发现他们可以轻松地旋转手腕,同时或分开张开手。他们还发现,这种动作比他们所习惯的传统仿生肢体要自然得多。
除了功能类型,患者还可以独立于其他运动控制个人运动的速度。例如,病人可以慢慢转动手,同时快速张开。研究人员说,这是让人感觉自然的一个重要组成部分。
在使用之前,病人和仿生手都接受了训练,因此机器学习算法可以“学习”如何解读它们独特的电子信号。Farina教授希望在未来的原型中消除这种需求,同时不牺牲对特定患者的个性化服务。“这种新型仿生手不仅更加自然,而且在日常工作中也比目前的患者可用的功能更优越。在这项临床研究之后,我们希望在三年内让这种药物进入市场。”Farina教授说。
研究人员目前正在努力获得对手的更大控制,包括移动单个手指的能力,并通过在患者体内无线传输信号来消除电极的需要。
来源:伦敦帝国理工学院