许多人在看到近乎真人的机器人时,会有一种不舒服的感觉,但不知怎的,这种感觉不太“正确”。
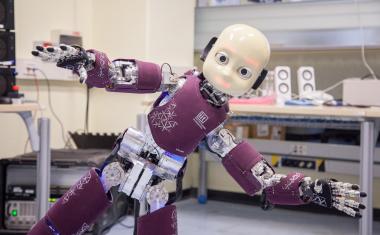
一个系统可以重新定位超过2000个不同的物体,机器人的手可以向上和向下。
当机器人犯错时,与人类同事重建信任取决于机器如何承认错误,以及它们看起来有多像人类。
研究人员进行了首次研究,研究人们如何对无人机描绘的各种面部表情作出反应。
人类对人工智能代理(如类人机器人)行为的解释取决于可以从神经活动中检测到的特定个人态度。
研究人员已经复制了人手的关键生物特性:自然的协同和适应性运动,仿生水平的力量和速度,高度拟人化和抓握的鲁棒性。
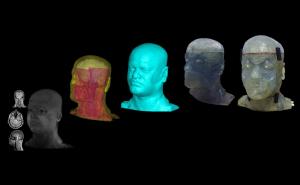
Sossena Wood 3D,皮特生物工程研究生,打印一个幻影头测试7T磁共振成像在射频研究设施。
本网站使用cookies为读者提供最佳的网站体验。请参阅我们的隐私政策了解我们如何使用cookies,以及如何编辑您的首选项。