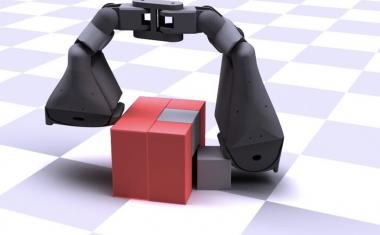
机器人的手可以轻松地操纵物体
来自麻省理工学院计算机科学和人工智能实验室(CSAIL)的科学家们创造了一种可以在两千多个不同的物体上重新定位的系统,机器人手面向向上和向上。
只有一岁,婴儿比机器人更为灵巧。当然,机器可以做的不仅仅是拿起并放下物体,但我们并不是那么复制自然拉动到探索性或复杂的灵巧操纵。
OpenAI尝试了“Dactyl”(意思是“手指”,来自希腊单词daktylos),使用他们的仿人机器人用软件解决魔方的立方体,这是一个迈向更多一般的软件AI.以及远离常见的单任务心态的一步。DeepMind创建了“RGB堆叠”,一个基于视觉的系统,挑战机器人学习如何抓取物品并堆叠它们。
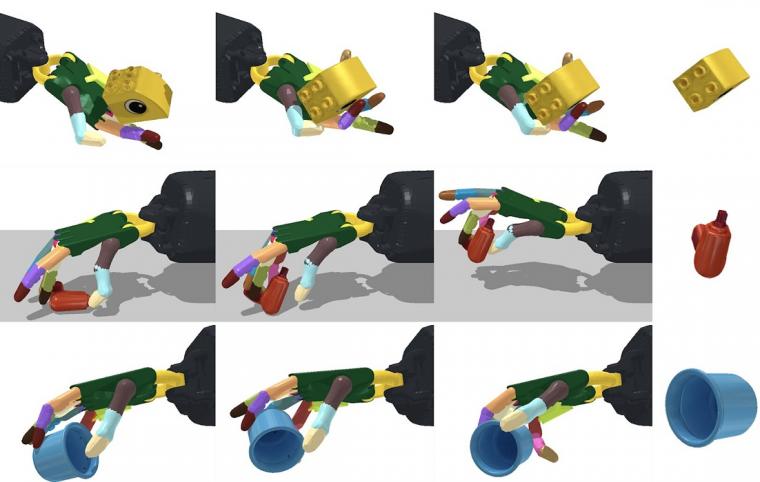
来自麻省理工学院计算机科学和人工智能实验室(CSAIL)的科学家们创造了一个更大规模的框架:一个可以重新定位超过2000个不同物体的系统,机器人的手可以向上和向下。这种操纵任何东西的能力,从杯子到金枪鱼罐头,再到Cheez-It盒子,都可以帮助手以特定的方式和位置快速地拾取和放置物体,甚至可以将看不见的物体归纳到一起。
广告

广告

这种灵巧的“手工”——通常受到单一任务和直立位置的限制——可能是加快物流和制造业的资产,有助于解决常见的需求,如将物品装箱,或熟练操作更广泛的工具。该团队使用了一个24度自由的拟人化的模拟手,并证明该系统可以转移到真实的人身上机器人系统在未来。
麻省理工学院(MIT) CSAIL博士生、不可思议人工智能实验室(Improbable AI Lab)成员、该项目的首席研究员陈涛(Tao Chen)说:“在工业领域,平行颚式夹持器是最常用的,部分原因是它控制简单,但它在物理上无法处理我们在日常生活中看到的许多工具。”“即使使用一把钳子也很困难,因为它不能灵巧地来回移动一个把手。我们的系统将允许有多个手指的手灵活地操纵这些工具,这为机器人技术的应用开辟了一个新领域。”
帮我个忙
由于需要控制大量的电机以及手指与物体之间接触状态的频繁变化,这种类型的“在手”对象的重新定向在机器人技术中一直是一个具有挑战性的问题。有超过2000个物体,这个模型需要学习的东西很多。
当手朝下时,问题就更加棘手了。机器人不仅需要操纵物体,还需要绕过重力,这样它就不会掉下来。
该团队发现,一种简单的方法可以解决复杂的问题。他们使用了无模型的加强学习算法(意味着系统必须弄清楚与环境的交互函数的价值函数)深入学习,以及称为“教师学生”培训方法的东西。
为此工作,“教师”网络培训有关在模拟中轻松可用的对象和机器人的信息培训,但不在现实世界中,例如指尖或对象速度的位置。为了确保机器人可以在模拟之外工作,蒸馏出“教师”的知识,以便在现实世界中获得的观察结果,例如由摄像机,对象姿势和机器人的关节位置捕获的深度图像。他们还使用了“重力课程”,其中机器人首先在零重力环境中学习技能,然后缓慢地将控制器慢慢地使控制器变为正常的重力状况,这是在这种步伐采取事物时 - 真正提高了整体性能。
“我们的结果表明,人们可以学习形状不可知的鲁棒控制策略。”
尽管看似违反直觉,但一个控制器(被称为机器人的大脑)可以在不知道形状的情况下,重新定位大量它从未见过的物体。
“我们最初认为,当机器人操纵物体时,视觉感知算法用于推断出物体的挑战是主要的挑战,”关于该研究的论文的作者,MIT教授Pulkit Agrawal说。“恰恰相反,我们的结果表明,人们可以学习塑造无关的强大控制策略。这表明视觉感知可能比我们习惯于思考的方式更重要,并且更简单的感知处理策略可能就足够了。”
许多小的圆形物体(苹果,网球,大理石),当用手面朝上下重新定位时,达到了百分百的成功率,以最低的成功率,不出所料,对于更复杂的物体,如勺子,螺丝刀或剪刀,更接近三十。
除了将系统带出野外,由于成功率随对象形状而变化,将来,团队指出,基于物体形状培训模型可以提高性能。