机器人辅助手术的新机械控制器设计
东京理工大学的科学家们为用于机器人手术的机械手臂设计了一种新型控制器。他们的控制器结合了商用机器人系统中使用的两种不同类型的夹持,以充分利用两者的优势,减少外科医生的工作量,并提供良好的精度。
机器人已经编织了许多不同的领域,医学也不例外;机器人辅助手术在过去十年中,几乎在每个手术亚专业的十年中急剧上升。通常使用机器人辅助手术使用外科手术机器人涉及主从配置的系统,其中“主从”是一个外科医生操纵来控制机械臂的控制装置。这种系统通过过滤掉手部震颤并将手部动作缩小,从而提高了外科医生的灵活性和精确度。它们还降低了常见手术并发症的风险,如手术部位感染。
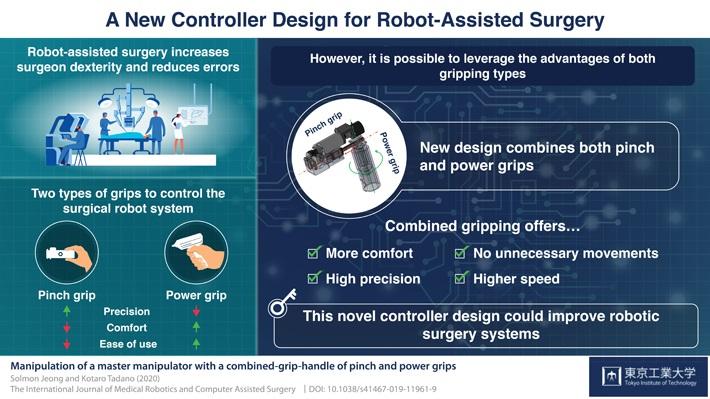
然而,机器人辅助手术也有其自身的缺点,尤其是对进行手术的人来说。机器人外科医生在手术过程中有时会感到身体不适,手指疲劳是很常见的。这种不适感与它们握着主控制器的方式有关。两种类型的握把通常被用来控制外科机器人:“夹紧握把”和“权力握把”。捏握已经在传统手术中使用了几个世纪;它涉及使用拇指、中指和食指来实现高精度的运动。另一方面,力量握法是用整只手抓住一个手柄,更适合做有力的工作和大的动作。
广告

广告

因为捏握在手指的某些肌肉上的张力,所以更有可能引起疲劳。虽然电力握把似乎造成这种不适,但它提供了更确切的控制。因此,在夹紧握把和缺乏对动力夹具的情况下造成的不适之间存在权衡。幸运的是,来自东京工业大学(东京技术)的一对研究人员,Solmon Jeong和Kotaro Tadano博士(东京技术)发现了这个问题的聪明解决方案。在国际医学机器人和计算机辅助外科调口器中发布的一项研究中,研究人员猜测,可以设计结合两种类型抓握的主控制器。塔达诺博士解释说:“在机器人手术,两个传统夹持方法的局限性与每个抓握型的优点和缺点强烈相关。因此,我们想调查组合抓握方法是否可以在机器人手术期间提高操纵性能,因为这可以利用夹持类型的优势,同时补偿它们的缺点。“
在概念验证实验之后,研究人员设计了一种机器人外科系统,该系统具有模块化主控制器,可以调节夹,功率或组合夹紧。通过指向实验测试系统,其中15名参与者必须控制机器人臂,以使针头尖端在不接触障碍物的最小时间内将针尖端进入目标孔中。针对每个抓握型测试各种条件,例如使用臂和手掌休息,使用手柄,抓握式和夹紧抓地动运动。结果表明,组合的抓握在各种前线的指向实验中产生了更好的性能,包括失败的数量(触摸障碍物),所需时间的时间和所执行的运动的总长度。许多参与者还据报道,由于使用这种方法的缓解和舒适,更喜欢将组合的夹持方法更倾向于另外两个。
这种新的主控制器设计可能是机器人辅助手术正确方向上的一步。“机器人手术主控制器的操作方法在直观性、舒适性、精确性和稳定性方面有着重要的影响。除了能够实现精确的手术,一种舒适的操作方法可能对患者和外科医生都有好处。”Tadano博士说。虽然未来还需要分析机械臂操作中涉及的其他变量,但这项工作无疑为先进的外科机器人系统铺平了道路。
来源:东京工业大学