在…领域机器人在美国,研究人员一直在寻找最快、最强大、最有效和成本最低的方法来驱动或使机器人做出执行预期功能所需的动作。
寻求新的和更好的驱动技术和柔软的机器人往往是基于原则的仿生学在这项技术中,机器部件被设计成模仿人类肌肉的运动,而且在理想情况下,能够超越人类肌肉的运动。尽管电动马达和液压活塞等执行器性能良好,但它们的刚性形式限制了它们的部署方式。随着机器人向更多的生物形式过渡,随着人们要求更多的仿生假体,驱动器需要发展。
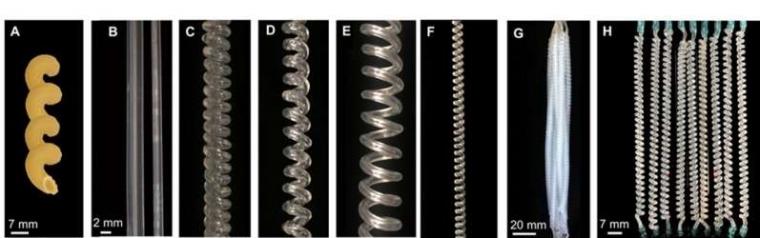
北亚利桑那大学(Northern Arizona University)机械工程系副教授(也是校友)迈克尔·谢弗(Michael Shafer)和海蒂·费根鲍姆(Heidi Feigenbaum)教授,以及研究生研究员迭戈·伊瓜拉斯-鲁伊兹(Diego Higueras-Ruiz)开发了一种新型的高性能计算机人造肌肉他们在NAU的动态主动系统实验室开发的技术。这篇题为“Cavatappi拉伸、扭曲和缠绕聚合物管的人工肌肉”的论文详细介绍了这项新技术如何凭借其灵活性和适应性,实现更像人类的运动,但在几个指标上优于人类骨骼肌。
Shafer说:“我们称这些新的线性驱动器为cavatappi人工肌肉,因为它们与意大利面食相似。”
广告

广告

由于它们的螺旋结构,驱动器可以产生更多的动力,使其成为理想的技术生物工程和机器人应用程序。在团队最初的工作中,他们证明了cavatappi人造肌肉的具体工作和功率指标分别是人类骨骼肌的10倍和5倍,随着它们的继续发展,他们期望产生更高水平的性能。
“cavatappi人工肌肉是基于扭曲聚合物驱动器(tpa),这是一种革命性的产品,因为它们的功能强大,重量轻,价格便宜。但它们效率很低,启动很慢因为你必须加热和冷却它们。此外,它们的效率只有大约2%。“对于cavatappi,我们通过使用加压流体来驱动,解决了这个问题,所以我们认为这些设备更有可能被采用。这些设备的反应速度和我们泵出液体的速度差不多。最大的优势是他们的效率。我们已经展示了高达45%的收缩效率,这在软驱动领域是一个非常高的数字。”
来源:北亚利桑那大学