系统有启用AI传感器节点以处理并应对由物理力施加的压力引起的“疼痛”。该系统还允许机器人在轻微“受伤”时检测和修复自身的损害,而无需进行人工干预。
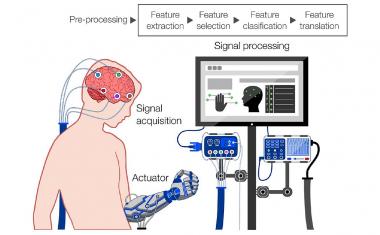
当前,机器人使用传感器网络来生成有关其直接环境的信息。例如,灾难救援机器人使用摄像头和麦克风传感器在碎片下找到幸存者,然后将其从手臂上的触摸传感器引导下来。在装配线上工作的工厂机器人使用视觉将其手臂引导到正确的位置并触摸传感器,以确定在拾取时该物体是否滑动。
当今的传感器通常不处理信息,而是将其发送到一个大型,强大的中央处理单元,并在其中进行学习。结果,现有的机器人通常被大量接线,从而导致响应时间延迟。它们还容易受到需要维护和维修的损坏,这可能是漫长而昂贵的。
广告

广告

新的NTU方法将AI嵌入传感器节点连接到多个小型,功能较小的处理单元,其作用类似于在机器人皮肤上分布的“迷你脑”。这意味着学习在本地发生以及接线要求和响应时间机器人科学家说,与常规机器人相比,减少了五到十倍。
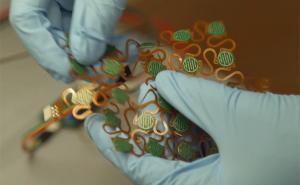
将系统与一种自我修复的离子凝胶材料相结合,这意味着机器人在损坏时可以在不干预的情况下恢复其机械功能。
该研究的共同领导作者,电气与电子工程学院的副教授Arindam Basu说:“让机器人有一天与人类一起工作,一个担心是如何确保他们将与我们安全互动。世界各地的科学家一直在寻找使机器人具有意识感的方法,例如能够“感到”痛苦,对其做出反应并承受严格的操作条件。但是,将多种传感器放在一起的复杂性所需的系统,这种系统的脆弱性是广泛采用的主要障碍。”
神经形态计算专家的Ascoc Assoc教授补充说:“我们的工作证明了机器人系统的可行性,该机器人系统能够通过最小的接线和电路有效地处理信息。通过减少所需的电子组件数量,我们的系统应变得负担得起可扩展。这将有助于加速市场上新一代机器人的采用。”
系统使“受伤”机器人自我修复

为了教机器人如何识别疼痛和学习破坏性刺激,研究团队塑造了孟经长途介绍者,它们是“人造疼痛受体和突触”的“大脑样”电子设备,能够记忆和信息处理。
通过实验室实验,研究小组展示了机器人如何实时学习伤害。他们还表明,即使在损坏后,机器人也继续对压力做出反应,证明了系统的稳健性。
当从尖锐的物体切割时“受伤”时,机器人会迅速失去机械功能。但是自我修复离子凝胶中的分子开始相互作用,导致机器人将其“伤口”“缝合”在一起,并恢复其功能,同时保持较高的响应能力。
这项研究的第一作者罗希特·亚伯拉罕·约翰(Rohit Abraham John)也是NTU材料科学与工程学院的研究员,他说:“这些新型设备的自我修复特性帮助机器人系统在'时反复缝合自己即使在室温下,也被割伤或刮擦受伤。这种模仿我们的生物系统的工作原理,就像人类皮肤在切割后自行愈合的方式。在继续有效工作的同时,由划痕和颠簸等轻伤引起的机械损害。如果在现实世界中将这种系统与机器人一起使用,则可能有助于节省维护。”
NTU材料科学与工程学院的副领导作家Nripan Mathews副教授说:“常规机器人以结构化的可编程方式执行任务,但我们的人可以感知其环境,学习和适应行为。大多数研究人员专注于制作越来越敏感的传感器,但并不关注他们如何有效做出决策的挑战。这种研究对于下一代机器人与人类有效互动是必要的。
“在这项工作中,我们的团队采取了一种方法,该方法是通过将新的学习材料,设备和制造方法应用于机器人来模仿人类神经生物学功能的方法。虽然仍处于原型阶段,但我们的发现为该领域设定了重要的框架,为研究人员解决这些挑战的前进方向。”
NTU研究团队基于他们以前关于神经形态电子产品的工作,例如使用光激活设备来识别对象,现在希望与行业合作伙伴和政府研究实验室合作,以增强其系统以进行大规模应用。
该研究发表在自然通讯。
资源:南南技术大学