开源机器人使所有人都提供复杂的机器人
由一支团队在Nyu Tandon工程学院和Max Planck社会研究所,四足犬大小,扭矩控制的Solo 8机器人可以通过世界各地的研究实验室轻松复制。
机器人能够定义散步,跳跃和导航地形等先进的物理行为的复杂动作可以花费50,000或以上,使得真实世界的实验对于许多人来说非常昂贵。现在,在Nyu Tandon工程学院的合作团队和马克斯·普朗克智能系统研究所(MPI-IS)在德国德宾登和斯图加特,设计了一种较低的成本,易于快速,易于组装的四足机器人,称为“SOLO 8”,可以升级和修改,打开复杂的研究之门和对有限预算的队伍的开发,包括初创公司,较小的实验室或教学机构的团队。
由Ludovic Righetti领导的团队,电气计算机工程和机械和航空航天工程副教授在NYU Tandon,在MPI-MPI-IS的Motion Valancation和Research Group的机器上进行了合作者,设计了一种眼睛的装置制作机器人研究和教育学更广泛地访问更广泛的机构和实验室 - 通过使用相同的开源平台 - 允许研究人员编制比较数据 - 迈向机器人迅速进步的关键步骤。
广告

广告

Solo 8的功能,包括扭矩控制的马达和驱动的关节,使它可以像昂贵得多的机器人一样行动:例如,它可以跳跃动作,以多种形态和方向行走,并在被推翻后恢复方向、姿态和稳定性。此外,Solo 8的所有组件都可以是3 d打印的或者在商店购买,施工文件在BSD 3-Clase许可下免费提供,使其他科学家能够在原型设计和开发自己的技术时利用模块化设置。
该机器人使以下领域的研究成为可能:
- 探索动物的肢体运动和运动在实验室表面,砾石,土,沙,泥浆和其他这种地形
- 对于复杂和动态的行为,包括那些将性能推到压力极限的行为,在昂贵的平台上尝试是太冒险了
- 非常动态的运动量(包括Parkour式行为),它很少有机器人可以执行
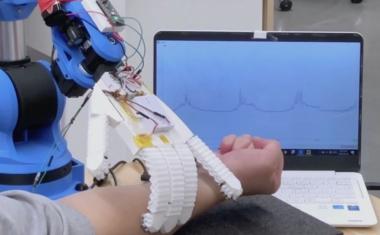
- 操纵环境(如开门或推动按钮)
- 机器人与先进通信技术的集成(该团队正在与纽约大学无线网络公司合作,研究Solo through的控制5G无线的)
一步一步,四条腿的机器人正在进行
该项目于2016年推出的,由Righetti和MPI-Is调查员,Mechatronics工程师和Alexander Badri-Spri-Sprowitz,Mechatronics Research Group,该项目于2016年推出。它最初由Rigtetti的ERC启动授权资助,然后由几个MPI-IS'基层项目和美国国家科学基金会赠款。“已经很多大学已经接近了我们,并希望将我们的机器人副本副本并将其用作研究平台,”MPI的研究小组领导者是在Tandon的职责外。他解释说,该概念最近被MPI的经验推理部门使用 - 是构建可以操纵物体的机器人手指。
他继续说:“我们的机器人平台是快速原型和高性能硬件的伟大基础。”“作为回报,我们也会受益,因为其他研究人员可以为这个项目做出贡献;例如,法国LAAS-CNRS的同事们已经开发了一种电子板,以帮助通过WiFi与机器人通信。此外,复杂的控制和学习算法可以在平台上快速测试,减少了从想法到实验验证的时间。这大大简化了我们的研究,我们的开源方法允许我们与其他实验室的算法进行比较。在我纽约的实验室里,我们开发了非常有效的运动优化算法,但在一个复杂的沉重机器人上测试它们可以很容易地为几个研究人员花了半年的工作,而这可以用独奏更容易地完成。这对我们来说是一个很大的交易。“
无需重新发明轮子
“对于一个研究小组自己制定这样一个机器人本身,它可以很容易地完成四年的工作,”Badri-Sprowitz说。“此外,您需要各种各样的专业知识。我们的平台是多个团队的综合知识。现在,全球任何实验室都可以上线,下载文件并打印零件,并从目录中购买剩余的组件。而且每个人都可以在几周内添加额外的功能。完成 - 你自己有一个世界级机器人。“
他补充说,这个自制的机器人估计价格为几千欧元,很容易调整以满足个人的研究目标,比商店购买的腿式机器人更容易被更多的研究人员和教师使用。“Solo有一些新的能力,我们有兴趣在未来探索,”Grimminger说。“例如,它有广泛的运动范围。当机器人仰面摔倒时,它可以把腿调整成另一种姿势,然后站起来。或者它可以从24厘米的站立高度跳到65厘米。”
多亏了扭矩控制的马达,机器人实现了弹簧般的行为,就像动物腿上的肌肉和有弹性的肌腱。“请注意,机器人使用的是虚拟弹簧,而不是机械弹簧。作为虚拟弹簧,它们可以被编程。例如,你可以调整弹簧刚度从软到硬,这很有趣,因为我们看到人类和动物的刚度是可变的,通过调整刚度,机器人实现了自适应和稳健的运动行为,”Badri-Spröwitz补充道。
SOLO 8重量超过2公斤,提供非常高的重量比。大多数Quadruced机器人显着较重,因此在研究环境中处理更危险和更难处理。重量低,现在可以更轻松地对学生处理机器人变得更加容易,更安全,甚至可以在背包里携带以运送家庭或会议。
这个机器人的名字中带有数字8,作为它的八个驱动关节的指示器:每个机器人腿可以改变它的角度和长度。然而,最近完成了一个新版本,并进行了第一次测试,12个自由度,每条腿3个自由度。新的机器人现在还可以侧身行走。巴德里- Spröwitz说:“由于增加了自由度,它将变得更加灵活,能够表现出更有趣和复杂的行为。”
The researchers’ work, “An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research,” accepted for publication in Robotics and Automation Letters, will be presented later this month at ICRA, the International Conference on Robotics and Automation, one of the world’s leading robotic conferences, to be held virtually.
来源:纽约大学坦顿工程学院