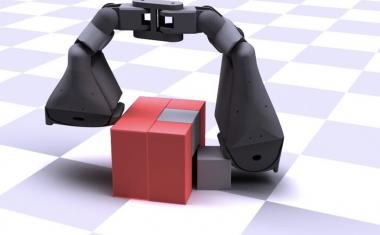
强大的电机驱动膝盖和脚踝,可以推动用户的身体,同时允许膝盖自由摆动,再生制动延长电池寿命。
资料来源:德克萨斯大学达拉斯分校
广告

广告

使用传统的假肢,截肢者必须抬起臀部将假肢脚抬离地面,并将腿向前摆动。这种不自然的步态比普通步行消耗更多的能量,导致臀部和下背部额外的压力和疼痛,并最终损害关节。机械腿有可能提供更舒适的步态,但它们的缺点之一是关节僵硬。
该研究的第一作者、最近从德克萨斯大学达拉斯毕业的博士Toby Elery说:“我们将关节设计得尽可能的柔顺或灵活。”“我们的机器人腿可以像人类关节一样工作,甚至做出反应,使膝盖自然地自由摆动,并在接触地面时减震。”

强大的马达意味着需要更少的齿轮来产生像人腿在站立和爬楼梯等活动时产生的强大扭矩。
汽车在机器人腿需要适应一个普通的肢体所占的空间。在过去,这意味着使用快速旋转的小型电机,然后使用一系列齿轮将快速旋转转化为更强大的力量。
问题是,齿轮噪音大,效率低,增加重量,使关节更难以摆动。格雷格的团队将两个更强的空间站发动机结合起来,一个为膝盖供电,另一个为脚踝供电,从而克服了这个问题。
使用更少的齿轮有很多好处。除了使自由摆动的膝盖,去除齿轮将噪音水平从真空吸尘器的规模降低到冰箱。此外,再生制动吸收了一些冲击时,假肢脚着地。“如果关节僵硬,力量就会转移到残肢,这会很痛苦,”格雷格说。“相反,我们用这种力给电池充电。”
在格雷格实验室测试假肢驾驶的截肢者说,他们可以感觉到腿在帮助他们走路时离开地面。格雷格说:“在某些情况下,他们发现臀部和背部的肌肉在我们的腿上的活动比传统的腿少。”“我们能够减少臀部的补偿。”
该团队的下一步是改进控制算法,以帮助腿部自动适应不同的地形、速度变化和不同类型活动之间的转换。
来源:密歇根大学