在以悠闲的步伐行走和为了你的生命而奔跑之间,人类的步态可以涵盖很宽的速度范围。通常,我们会选择在给定速度下消耗最少能量的步态。例如,在低速度下,散步的代谢率低于慢跑时跑步的代谢率;反之,在高速度下,跑步的代谢成本低于快走的代谢成本。
学术和工业实验室的研究人员此前已经开发出用于康复和其他生活领域的机器人设备,既可以帮助行走,也可以帮助跑步,但没有一种不系绳的便携式设备可以有效地做到这两点。用单一设备辅助行走和跑步是一个挑战,因为这两种步态的生物力学根本不同。然而,两种步态都有一个共同之处,那就是髋关节的伸展,大约在脚接触地面的时候开始,需要相当大的能量来推动身体向前。
哈佛大学维斯生物工程研究所、约翰·a·保尔森工程与应用科学学院(SEAS)和内布拉斯加大学奥马哈分校的研究人员团队,现在已经开发出一种便携式外服,在行走和跑步时帮助特定步态的臀部伸展。他们的轻便外服由腰部和大腿处的纺织部件制成,并在背部下部安装了一个移动驱动系统,该系统由一种算法控制,能够可靠地检测从步行到跑步的过渡,反之亦然。
研究小组首先表明,与步行和跑步时相比,使用者在基于跑步机的室内测试中所穿的Exo西服平均降低了9.3%的步行代谢成本和4%的跑步代谢成本。领导这项研究的康纳·沃尔什博士说:“我们很兴奋地看到,该设备在上坡行走、不同的跑步速度和室外地面测试中也表现良好,这表明了该系统的多功能性。”。沃尔什是怀斯研究所的核心教员,戈登·麦凯(Gordon McKay)海洋工程和应用科学教授,哈佛生物设计实验室创始人。沃尔什说:“虽然我们发现代谢的减少是适度的,但我们的研究表明,便携式可穿戴机器人不仅可以协助一项活动,还可以帮助为这些系统在我们的生活中无处不在铺平道路。”。
广告

广告


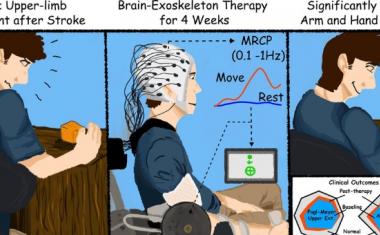
髋关节外服是作为美国国防高级研究计划局(DARPA)的前战士网络项目的一部分开发的,是该团队多年研究和优化软外服技术的成果。该团队之前开发的多关节外服可以在行走过程中帮助髋关节和踝关节。通过与ReWalk Robotics公司的合作,一款旨在改善中风幸存者步态康复的医用外服现已在美国和欧洲上市。
与过去的多关节外穿服相比,该团队最新的臀部辅助外穿服设计更简单、重量更轻。它通过电缆驱动系统帮助佩戴者。驱动电缆在腰带和大腿之间施加拉力,以在髋关节处产生与臀肌协同工作的外部伸展扭矩。该装置总重量为5kg,90%以上的重量位于身体重心附近。“这种集中重量的方法,加上灵活的服装界面,最大限度地减少了穿衣者的精力负担和运动限制,”第一作者之一、沃尔什团队的SEAS研究生Jinsoo Kim说。“这对走路很重要,但对跑步更为重要,因为四肢来回移动的速度要快得多。”Kim与前沃尔什团队博士后研究员、现任韩国首尔中央大学助理教授的朱克·李博士分享了这篇文章的第一作者。
该团队必须解决的一个主要挑战是,exosuit需要能够区分步行和跑步步态,并在步态周期的正确时间提供适当的帮助,相应地改变其驱动配置。
为了解释步态周期中不同的动力学,生物力学家经常把步行比作倒立摆的运动,把跑步比作弹簧-质量系统的运动。在行走过程中,身体重心在脚跟撞击后向上移动,然后在站姿阶段的中间达到最大高度,在站姿阶段的末尾下降。在跑步中,质心的运动是相反的。它下降到最低高度在站姿阶段的中间,然后向上移动到推出。“我们利用这些生物力学的见解,开发了我们受生物启发的步态分类算法,可以通过安装在身体上的传感器监测个人质心的加速度,可靠地检测从一种步态到另一种步态的过渡。”共同通讯作者、内布拉斯加大学奥马哈分校助理教授菲利普·马尔科姆博士说。“一旦检测到步态变化,这套外骨骼就会自动调整其驱动轮廓的时间,以帮助其他步态,正如我们所证明的那样,它能够减少穿戴者的代谢氧消耗。”
在正在进行的工作中,该团队专注于优化该技术的各个方面,包括进一步减轻重量、个性化帮助和提高易用性。沃尔什说:“看到我们的方法取得了这么大的进展,我们感到非常满意。我们很高兴能继续将它应用于一系列应用,包括帮助步态障碍的人,从事体力繁重工作有受伤风险的行业工人,或周末休闲战士。”
Wyss研究所的“这一突破性的研究出来的Bioinspired软机器人平台让我们一窥未来可穿戴机器人设备可以改善健康的生活,以及为那些受伤或需要康复,”唐纳德·因格贝尔Wyss学院创始董事说,医学博士。
来源:哈佛大学维斯研究所