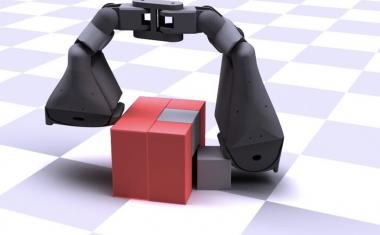
在工业环境中,机器人经常被用于需要重复抓取和操作物体的任务。结束了机器人有人手的地方被称为末端执行器或抓手。“这种新颖的仿人手设计是一种软硬混合的柔性抓手。与传统的纯软手相比,它可以产生更大的抓握力,同时也比其他用于较重物体的同类产品更稳定、更准确地操作。”该研究的第一作者、密歇根州立大学软机械与电子实验室主任、包装、机械工程、电气与计算机工程助理教授曹长勇说。
一般来说,软手抓握器——主要用于易碎、轻和形状不规则的物体——存在以下几个缺点:尖锐的表面、抓握不平衡负载时的稳定性差,以及处理沉重负载时的抓握力相对较弱。
广告

广告

在设计新模型时,曹和他的团队考虑了从水果采摘到敏感的医疗护理等一系列人类与环境的交互作用。他们发现,一些过程需要与脆弱对象进行安全而牢固的交互;大多数现有的夹持系统不适合这些目的。
该团队解释说,设计的新颖性使得原型机展示了一种反应迅速、重量轻的握持器的优点,能够处理大量的任务,而传统上需要不同类型的握持系统。
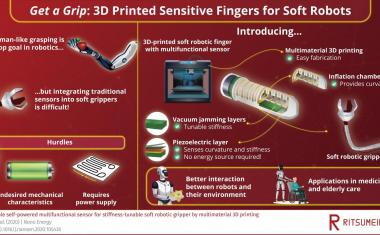
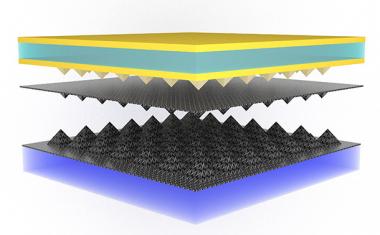
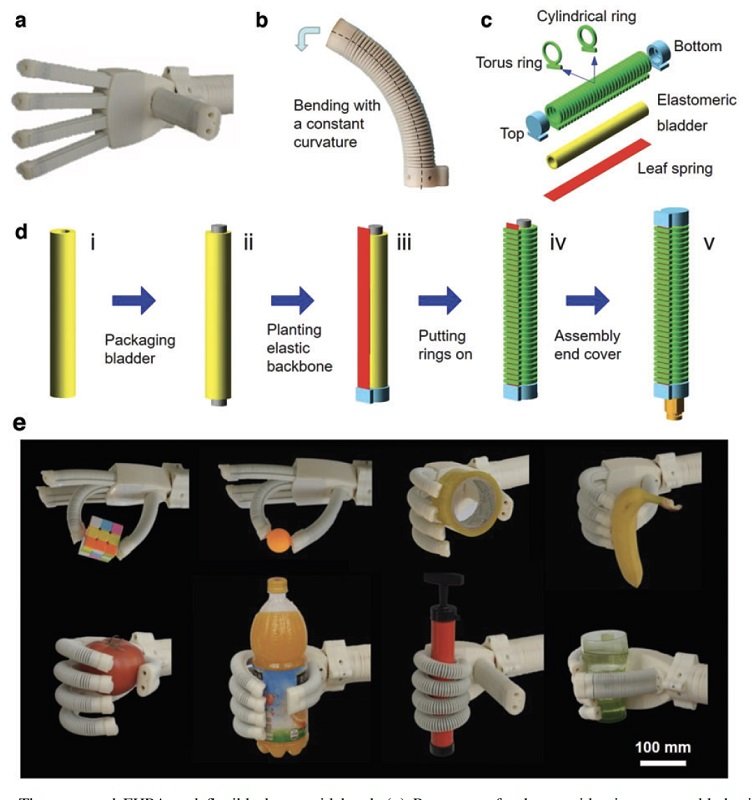
这只柔软的仿人手的每根手指都由一个灵活的混合气动驱动器(或简称FHPA)构成,由加压空气驱动弯曲,创造了一个模块化的运动框架,其中每根手指都独立于其他手指移动。曹说:“用于工业应用的传统刚性抓手通常由简单但可靠的刚性结构制成,有助于产生大的力、高精度和可重复性。”“拟用的柔软的仿人手在抓取复杂形状和易碎物体时表现出了卓越的适应性和兼容性,同时保持了高水平的刚度,以施加强大的夹紧力来提升重物。”
从本质上说,这是两个世界的最佳选择,曹解释说。FHPA由软硬两部分组成,围绕着一个独特的结构组合——驱动气囊和一个骨状的弹簧核心。曹说:“它们结合了软爪的可变形性、适应性和顺应性的优点,同时保持了由执行器的刚性产生的大输出力。”
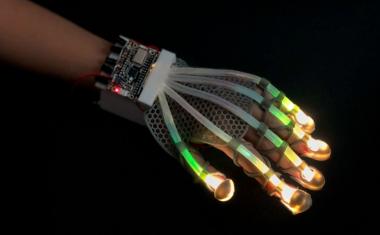
他认为,该原型机可以用于水果采摘、自动化包装、医疗保健、康复和手术机器人等行业。由于未来研究和发展的空间很大,该团队希望将其进展与曹文轩最近的所谓“智能”抓手的工作结合起来,将打印技术集成在一起传感器在扣人心弦的材料中。通过将这种混合抓手与“软臂”模型相结合,研究人员的目标是更准确地模拟精确的人类动作。
这项研究发表在柔软的机器人。
来源:密歇根州立大学