德国的护理行业正面临着众多挑战:除了持续的人手短缺,医务人员的压力也在不断增加——而且不仅是在最近。需要照顾的人的日常工作也需要他们在日常生活中获得支持,这对护理人员的身体健康造成负担,并导致疾病、病假甚至职业残疾。为此,德国联邦教育和研究部(BMBF)资助了AdaMeKoR项目,该项目旨在寻找解决方案,以减轻医务工作者的负担,同时为患者创造更多的自主权。
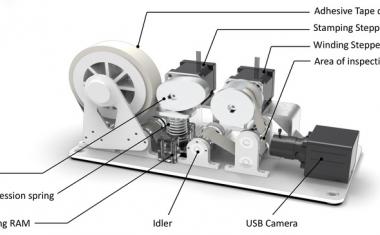
该研究项目于2020年3月15日开始,其核心内容是开发未来医院病床设备,其中包括一个机器人手臂和传感器为了控制正确使用。由Johanniter-Undall-Hilfe人道主义组织协调,奥斯纳布鲁克和奥尔登堡的大学以及DFKI在不同的部件上工作,可以将医院病床转变为护理人员和患者的救济系统。随着机器人创新中心和网络物理系统研究部门,在不来梅的整个DFKI位置正在参加该项目。
广告

广告

为身体有限制的病人提供第三只手的机器手臂
作为该项目的一部分,奥德斯堡的Carl von Ossietzky大学正在研究一个机器人手臂,用于转移患者以及分析护理工作者姿势的传感器。DFKI专注于处理机器人支持以及动员。这涉及一种机器人手臂,具有物理限制的人可以更独立地生活,另一方面,在诸如支持床和轮椅之间移动和转移患者的能力的概念机器人设备.
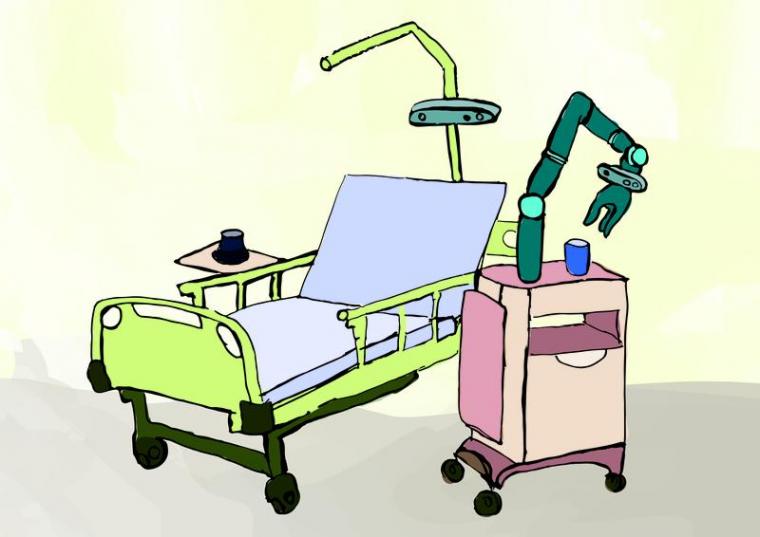
由Rolf Drechsler教授领导的信息物理系统研究部,正在研究Kinova机器人手臂的控制机制,该手臂可以与操纵杆等易于管理的系统一起使用。这只手臂可以作为行动不便的人的第三只手。为此,机器人手臂被安装在床头柜上,由操纵杆或更复杂的3D鼠标控制,可以帮助够到物体。
转移到轮椅上的机器人概念
在机器人技术创新中心,由h.c.弗兰克·基什内尔教授领导,开发了一些概念,允许病人在支持下转移——例如从床上转移到轮椅上,这对医务工作者来说是一个巨大的身体压力。机器人解决方案可以解决这个问题,特别是当它们还可以安全地处理较高体重的人,使用方便,可以无缝地与医务人员的日常生活相结合。最有前途的概念将在计算机上可视化,以供可能的实现。
该项目的目标是展示机器人,感官和部分自动化支持在处理病人的可能性。护理人员的身体放松和姿态控制,以及患者自主能力的提高,都是为了提高两个目标群体的健康和生活质量。为此,德国联邦教育和研究部(BMBF)为AdaMeKoR项目提供了为期三年的资金,总额为180万欧元,其中约62.3万欧元拨给了DFKI。