来源:在上面
“术中超声波尤其有用,因为它可以通过提供隐藏设备和解剖的实时图像来指导手术,”论文作者王飞跃说,他是中国科学院自动化研究所复杂系统管理与控制国家重点实验室主任。“然而,对高度专业化技能的需求始终是可靠和可重复获取的障碍。”
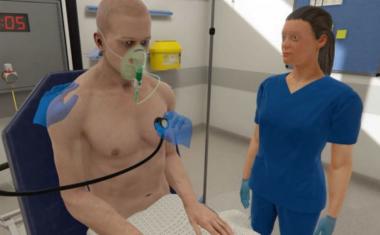
王指出,现场超声技师的可用性可能是有限的,而且许多需要术中超声的手术通常也需要x射线成像,这可能会使操作者暴露在有害的辐射中。为了缓解这些挑战,王和他的团队开发了一个平台机器人术中经食管超声心动图(TEE),一种广泛用于诊断心脏病和指导心脏外科手术的成像技术。
“我们的结果表明机器人的使用具有模拟平台可以潜在地提高术中超声的普遍可用性,并帮助经验较少的操作者,”王说。
广告

广告

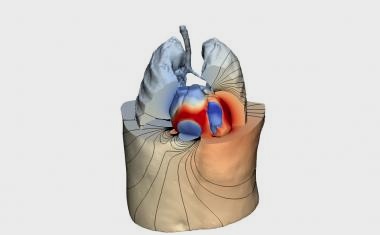
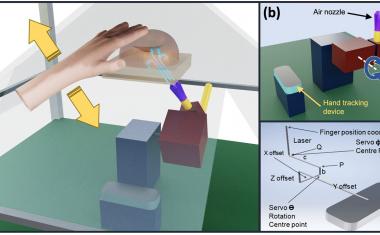
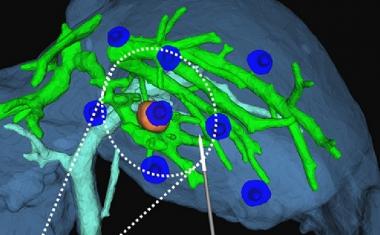
研究人员采用并行控制和智能技术,在虚拟环境中使操作人员与机器人配对,从而准确地代表真实环境。该机器人配备了一个超声图像数据库和一个能够重建解剖结构的数字平台,可以导航目标区域,为操作员更好地可视化和计划潜在的外科纠正计算实验。“这种系统可以用于视图定义和优化,以协助预规划,以及算法评估,以促进实时控制和导航,”王说。
接下来,研究人员计划进一步整合目前提出的并行实/虚拟系统与特定的临床需求,以协助此类成像机器人的平移研究。王说:“最终目标是将虚拟系统和物理机器人集成到体内临床试验中,从而提出一种在医疗操作中使用并行智能的新的诊断和治疗方案。”
研究人员发表了他们的方法自动化学报.
来源:中国自动化学会