微创外科手术在医学上,外科医生通过自然开口或外部小切口进入内部组织是常见的做法。它们被用于各种各样的问题,如通过导管输送支架,治疗腹部并发症,以及在患有神经系统疾病的患者的颅底进行经鼻手术。
广告

广告

现在,机器人由威斯大学副教授罗伯特·伍德博士和博士后彼得·约克博士领导的工程师们,哈佛大学的威斯生物启发工程研究所和约翰·a·保尔森工程与应用科学学院(SEAS)共同开发了一种6 × 16毫米小型化封装的激光制导微型机器人,该机器人操作速度快、精度高,可以与现有的内窥镜工具集成。他们的方法可以大大提高许多微创手术的能力。
“使微创性成为可能激光手术在身体内部,我们设计了一个microrobotic该研究的第一作者兼通讯作者、伍德的微型机器人团队的博士后研究员约克说。“由于其广泛的关节范围,最小的占地面积,和快速和精确的行动,这种激光导向末端执行器有很大的潜力,只需添加到现有的内窥镜设备,即插即用的方式,以提高手术能力。”
该团队需要克服在设计、驱动和精密加工在光束从光纤中射出后,可以对光束进行严格控制的光学转向机制。这些挑战,连同对速度和精度的要求,都因尺寸的限制而加剧——整个装置必须安装在一个直径大约和吸管差不多的圆柱形结构中,才能用于内窥镜检查。
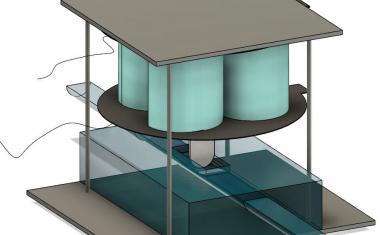
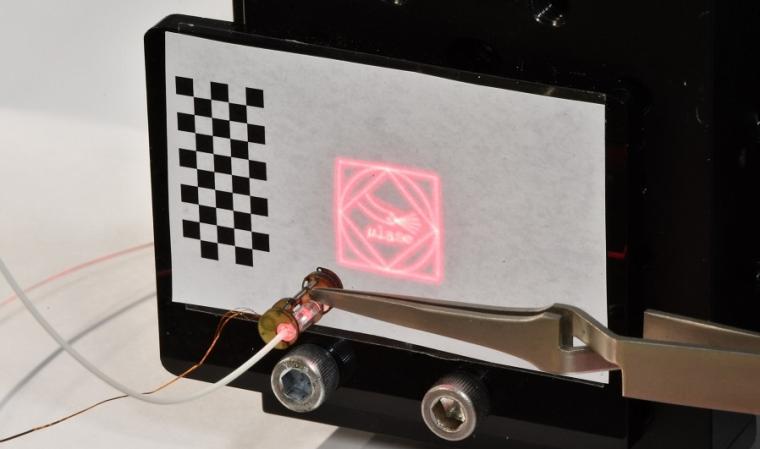
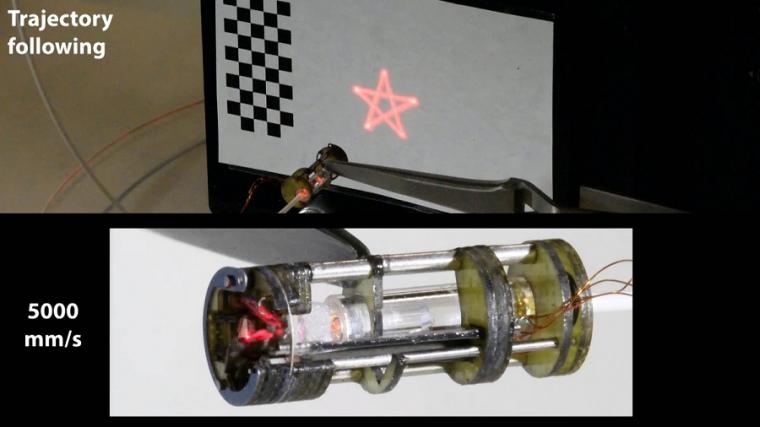
“我们发现,对指导和调整出激光束,配置的三个小镜子可以快速旋转对彼此在一个小检流计的设计为我们提供了一个甜点小型化的努力,“第二作者车辙佩纳说,最专业的机械工程师伍德组。“为了实现这一目标,我们利用了我们的微型制造库中的方法,模块化组件逐步层压到毫米级的上层结构上,这是一个非常有效的制造过程,当涉及到快速迭代设计,以寻找最佳的,并为大规模生产成功产品提供强有力的战略。”
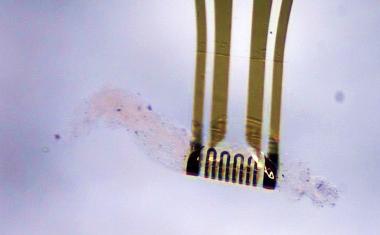
团队证明他们laser-steering末端执行器,微型圆柱测量只是直径6毫米,16毫米长,能够制定并遵循复杂轨迹中可以执行多个激光消融速度高,在一个大范围,重复精度高。
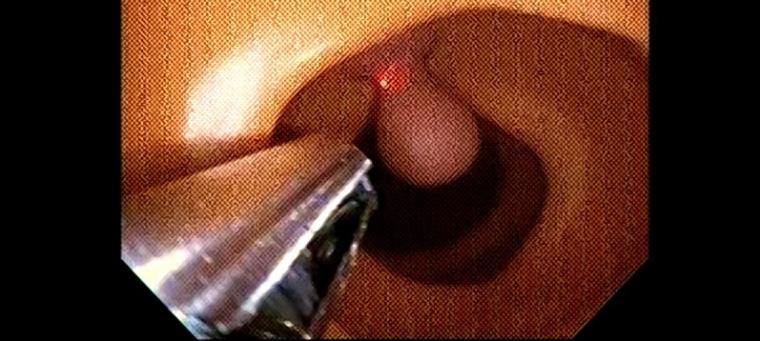
进一步显示设备,当普通结肠镜的结束,可以应用到一个栩栩如生的内镜任务,纽约和Pena,建议Wyss临床研究员丹尼尔·肯特,医学博士,成功地模拟了切除息肉的导航设备通过指令的台式幽灵组织用橡胶制成的。肯特也是贝斯以色列女执事医疗中心的普通外科住院医师。
“在这种多学科的方法中,我们设法利用自己的能力快速原型化复杂的微型机器人机制,我们在过去的十年中开发,为临床医生提供了一个非破坏性的解决方案,可以让他们提高在人体中进行微创手术的可能性,改变生活或潜在的拯救生命的影响。”资深作者Wood博士说,他也是海洋工程与应用科学学院查尔斯河教授。
“维斯研究所专注于微型机器人设备,这种新的激光导向设备由罗伯特·伍德的团队开发,与临床医生和翻译专家跨学科合作,有望彻底改变微创外科手术在许多疾病领域的实施方式。”Wyss的创始董事Donald Ingber医学博士说,他也是哈佛医学院和波士顿儿童医院的Judah Folkman血管生物学教授,以及SEAS的生物工程教授。
这项研究已经在科学的机器人。
来源:哈佛大学