该项目涉及远程控制建筑机器人手臂没有重型电机传统上安装在手腕关节。相反,它们被放置在机器的基座上。“由于手臂上没有马达,它们比传统的手臂轻得多,”东北大学机械与工业工程助理教授彼得·惠特尼(Peter Whitney)说。“所以现在,如果你有一个更轻的手臂,它就更容易移动。”
工程技术的进步有可能克服人类在远程控制机器人理解机器所处环境时所面临的一个基本障碍。
“很难感知机器人的确切位置,相对于环境的感人的东西,或如何有多难触摸物体,”惠特尼解释说,他的研究重点是机器人的设计,材料制成的,以及他们如何操作和控制。他补充说:“这些都是影响我们如何获得良好性能的因素,同时也能保证安全性。”
广告

广告

研究人员现在有能力做到这一点机器学习通过实时信息可以得知施力的大小。惠特尼说:“所以当我们试图抓住一个物体或操纵一个物体时,我们实际上可以利用这些接触力,就像人类肌肉如何感知物体的重量一样。”
惠特尼说,机器学习是东北大学教员中一个活跃的研究领域。他与美国国家科学基金会(National Science Foundation)的霍里计算机科学学院(Khoury College of computer Sciences)电子与计算机工程副教授罗伯特·普拉特(Robert Platt)合作,参与一个涉及轻量级机器人的项目,这些机器人的设计更适合直接、有意地与物体接触。
惠特尼还与电气和计算机工程副教授塔斯金·帕迪尔(Taskin paddir)合作,研究远程控制的机器人作为机械替身与朋友和家人进行身体互动的潜力。惠特尼说,这项技术可以让人们拥抱被隔离的爱人,这是它的潜力的一个例子。
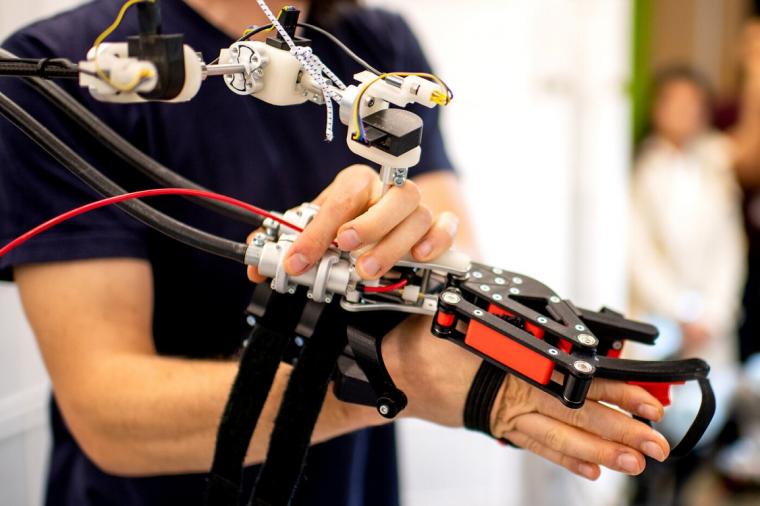
该项目的视频演示涉及一名研究人员戴着一个c形的抓爪连接到他的右手,同时附近的机械手臂模仿他的准确动作,显示了设计为低摩擦的液压技术的前景。视频中的研究人员将他的手臂上下移动,左右扫视,手腕处弯曲,这些平滑的动作被机械手臂同步复制。但不太明显的是,当机械手臂闭合物体时,人类操作者如何感受到与机械手臂相同的力量,从而让用户获得纹理表面的感觉。
来源:东北大学