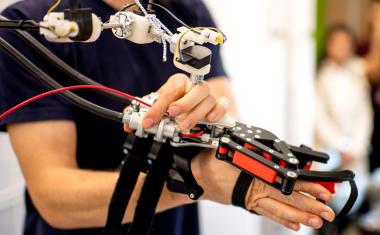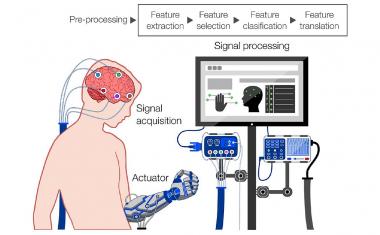
传统上,微创手术(MIS)的成功取决于临床医生的能力。主要的MIS程序包括血管手术,在这期间导管插入身体,引导到一个目标位置,并用于治疗血管疾病。血管手术中一个特别的挑战是导管尖端的准确定位。特文特大学的研究员克里斯托弗·休尼斯提出了一个解决方案。他设计了ARMM系统,这是一个机器人手术平台,可以引导手术导管通过外部产生的电磁场。Heunis设想它是一种安全、精确的替代手动操作的方法,并希望为外科医生提供更快完成干预所需的灵活性。
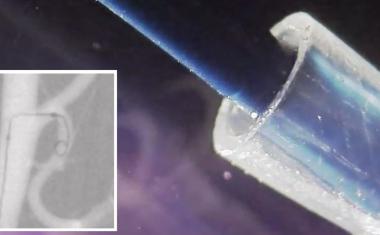
通过利用单一的协作机器人手臂,这个ARMM平台(用于磁操作的高级机器人)可能很容易符合或在确保小占地面积中。到目前为止,在手术机器人特纳特大学实验室,他表明,导管可以磁性引导和动物组织,具有淹没的细菌精度。
血管疾病(影响动脉,心脏等)的血管疾病已被充分记录。受这些疾病影响的器官是微妙的偏远的,并且在某些情况下,脉管系统遭到折磨。用于血管内修复的标准干预涉及高风险并发症,导致导管期间不必要的创伤(当外科医生插入和操纵在动脉中的导管时)。此外,导管转向的准确性高度依赖于临床医生的能力。
广告

广告

Heunis毕业于生物医学2017年,他来到了荷兰。在他四年的博士生,他还花大量的时间来指导和监督- 20的学士和硕士学生,他经常传达了同样的信息:“不管你的过去和你的起源和不分的艰辛:被授权你的动机。作为一个学者,你经常会遇到不支持你的人,或者你宁愿避免的情况。抓住这个机会——最终,别人能真正影响你的唯一方式就是给你他们的意见,而这并不一定要成为你的现实。你可能会惊讶地发现,做对自己最有利的事情是多么容易——所以走出去(象征性地),去做吧!”
目前,Heunis与新颖-T密切合作,探讨该系统在荷兰和德国附近的该系统的可行性。“我的研究的亮点是我加入了新颖的创业竞赛时,我用纯粹的好奇心。我没想到的是我的项目在临床世界中的潜力。事实证明,ARMM系统可能是下一个DA Vinci。我的座右铭是:一天或一天 - 你决定。这成为我基于我决定的基础 - 特别是那些影响我未来的人,更重要的决定在大流行期间2020年。我在几个月内从一个学术转变为企业家,实现了我的工作可能拥有的影响 - 作为潜在的医疗系统,ARMM可以帮助患者尽可能快地恢复。“
来源:特文特大学