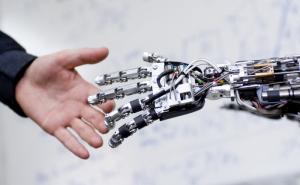
利用机器人来扰乱参与者的步态周期,研究人员发现,由小脑控制的前馈机制和在脊椎水平控制的反馈机制决定了神经系统如何对机器人引起的步长变化作出反应。
资料来源:哈佛大学维斯研究所
我们中的许多人最近都没有花太多时间在户外,但当我们四处走动时,仍有许多障碍需要我们导航:咖啡桌的边缘,小孩子,家里的狗。我们的大脑如何适应行走步数的变化?哈佛大学威斯生物启发工程研究所和斯波尔丁康复医院运动分析实验室的研究人员用机器人试图回答这个问题,并发现小脑和大脑的机制脊髓确定神经系统对机器人引起的步长变化的反应。这项新研究指出了改进基于机器人的身体素质的途径康复项目的病人。
“我们对运动适应背后的神经机制的理解仍然有限。具体来说,迄今为止,行为、功能和生理过程如何协同工作以在运动过程中实现适应仍然是难以捉摸的,”保罗·博纳托博士说,他是维斯研究所的副教授和斯波尔丁运动分析实验室的主任,领导了这项研究。“我们的目标是更好地理解这一过程,从而开发出更有效的临床干预措施。”
广告

广告

在这项研究中,该团队使用机器人在人类受试者行走时,对他们产生两种相反的单边机械扰动,在多个步态周期中影响他们的步长。从肌肉中记录的电信号被收集和分析,以确定肌肉协同作用(一组肌肉的激活,以产生一个特定的运动)如何在扰动下发生变化。结果显示,在适应过程中,来自小脑的前馈控制信号和来自脊髓的反馈驱动控制信号相结合。然而,这两个过程对电机输出调整的相对侧特异性贡献取决于所传递的扰动类型。总的来说,这些观察结果提供了证据,表明在人类中,下行和传入驱动都投射到编码运动肌肉协同作用的脊髓间神经网络上。
这些结果反映了之前动物研究的观察结果,强烈地表明在人类中存在一组可以被皮层和传入驱动访问的调节肌肉协调的脊髓中间神经元。Bonato说:“我们的团队希望在未来的一年中,在这项工作的基础上,开发新的方法来设计机器人辅助步态康复程序,针对肌肉协同作用中特定的下行和传入驱动反应。”
来源:哈佛大学的维斯研究所