当扁豆和其他缠绕植物用它们的触感枝条缠绕在像绳子和杆子这样的支撑物上向上生长时,UGA团队的机器人被设计成能够牢固而轻柔地抓住直径只有1毫米的物体。
“我们尝试了不同的设计,但我们对结果不满意,然后我回忆起几年前我在花园里种的豇豆,”该研究的第一作者、副教授梅布尔·霍克(Mable Fok)说。“这种植物可以紧紧地抓住其他植物或绳子。所以,我做了一些关于缠绕植物的研究,认为这是一个很好的自然设计,值得我们探索。”
在发表在《光学快报》(Optics Express)杂志上的一项新研究中,研究人员表示,他们的柔软的机器人与现有的机器人装置相比,螺旋夹持器提供了几个优势。
广告

广告

只需要一个小空间
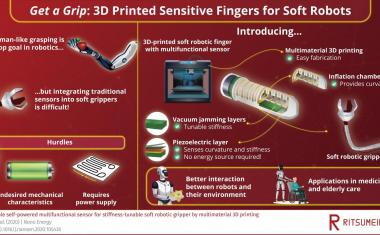
Fok说:“我们的机器人的缠绕动作只需要一个气动控制,这大大简化了它的操作,不需要多个气动控制之间复杂的协调。”“由于我们使用了一种独特的缠绕运动,这种柔软的机器人夹持器在受限区域工作得很好,只需要很小的操作空间。”
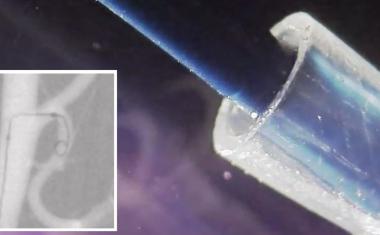
与许多现有的机器人相比,UGA设备还提供了另一项进步:一个提供关键实时反馈的嵌入式传感器。霍恩说:“我们在机器人的弹性脊柱中间植入了一个光纤传感器,可以感知机器人的缠绕角度、目标的物理参数,以及任何可能导致目标松动的外部干扰。”
研究人员认为,他们的软机器人夹持器——略长3英寸多一点,由硅胶制成——可能在农业、医学和研究等许多场合都很有用。应用可能包括选择和包装需要柔软触摸的农产品,如植物和花卉,手术机器人,或者在实验过程中选择并保存研究样本在易碎的玻璃管中。
推荐的文章
高精度、精准
在他们的研究中,研究小组表示,这种螺旋形钳子被证明可以有效地夹住铅笔和画笔等物品,即使是像拉直的回形针一样细的金属丝那么小的物品。该器件具有良好的重复性、高缠绕传感精度和精确的外干扰检测。
除了霍英东,研究团队还包括杨梅和刘宁,两人都是工程学博士研究生;利亚姆·保罗·库珀(Liam Paul Cooper)是一名学习计算机系统工程的本科生;王先桥,工程学院副教授。
该团队计划继续致力于改进基于光纤传感器读数的自动反馈控制。他们还想探索微型化设计,作为生物医学机器人的基础。“这种缠绕式软机器人与它的嵌入式光纤传感器构成了一个更全面的软机器人的基石。具有更简单的设计和控制绝对是一个优势,”Fok说。
来源:佐治亚大学