与刚硬的前辈相比,软机器人有一个明显的优势:它们可以适应复杂的环境,处理脆弱的物体,并与人类安全互动。它们由硅酮、橡胶或其他可伸缩聚合物制成,非常适合用于康复外骨骼和机器人服装。软的仿生机器人有一天可能被部署到探索偏远或危险的环境。大多数软式机器人是由刚性的、嘈杂的泵驱动的,这些泵将液体推入机器的运动部件中。因为它们是通过管子连接到这些笨重的泵上的,所以这些机器人的自主能力有限,佩戴起来也很笨重。
广告

广告

切断软机器人的束缚
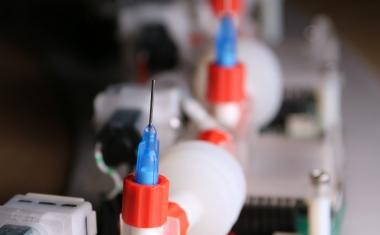
EPFL软传感器实验室(LMTS)和智能系统实验室(LIS)的研究人员与日本东京芝浦理工学院的研究人员合作,开发出了第一个完全软泵——甚至电极也是柔性的。重量只有1克,泵是完全无声的,消耗很少的能量,它从一个2厘米× 2厘米的电路,包括一个可充电电池。“如果我们想要驱动更大的机器人,我们就把几个泵连接在一起,”工程学院lmt主任赫伯特·谢伊(Herbert Shea)说。
这种创新的泵可以摆脱软机器人的束缚。“我们认为这是软机器人领域的一个范式转变,”谢伊补充道。软泵也可以用来循环嵌入在智能服装中的柔性细管中的液体,从而使服装能够主动冷却或加热身体的不同区域。这将满足外科医生、运动员和飞行员的需求。

它是如何工作的?
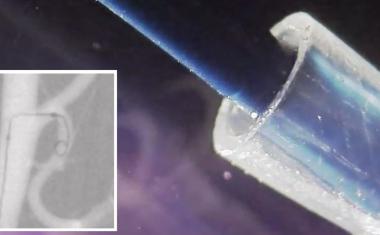
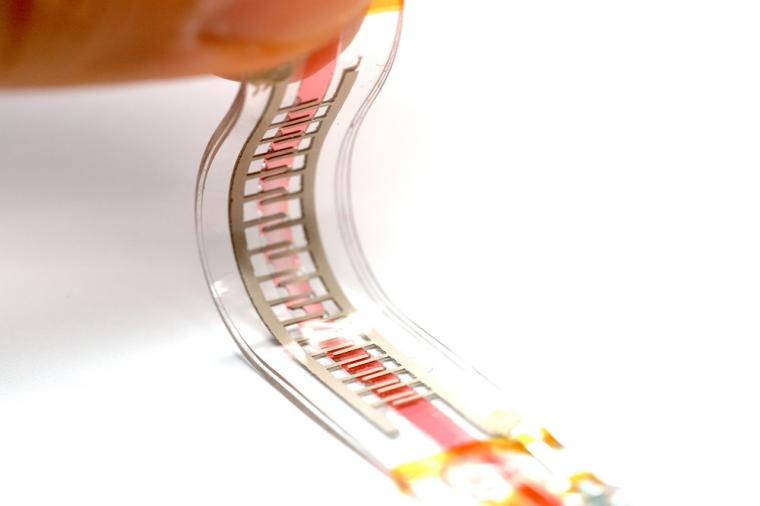
这种柔软的、可伸缩的泵是基于今天在超级计算机等系统中用于循环冷却液体的物理机制。该泵有一个直径为1毫米的管状通道,其中有排电极被打印出来。泵内充满介质液体。当施加电压时,电子从电极跳到液体中,使一些分子带电荷。这些分子随后被其他电极所吸引,将剩下的液体与它们一起拉过管子。“我们可以通过调节电场来加快气流的速度,但它仍然是完全无声的,”维托·卡库乔罗(Vito Cacucciolo)说,他是lts的博士后,也是这项研究的主要作者。

开发人造肌肉
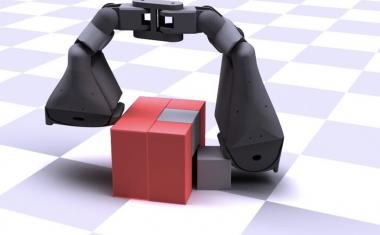
研究人员已经成功地将他们的泵植入一种被广泛应用于软机器人实验室的机器人手指中。他们现在正与日本的Koichi Suzumori实验室合作,该实验室正在开发流体驱动的人造肌肉和灵活的外骨骼。
EPFL团队还安装了一种带管子的织物手套,并表明使用泵可以根据需要加热或冷却手套的区域。“它的工作原理有点像你家里的供暖和制冷系统,”Cacucciolo说。这个申请已经引起了许多公司的兴趣。