神经外科机器人可视化系统
研究评估了用于神经外科手术的机器人手术显微镜,发现Kinevo 900对先前显微镜提供了各种改进。
手术显微镜已成为现代神经外科和其他外科专业程序的成功至关重要的,它们是现代护理标准所必需的。手术显微镜已成为开发改进的用户控制界面和机器人系统的主动平台。与以前的手术显微镜相比,最新的发展提供了更多的功能。
最近进行了为期一年的研究,以对Zeiss Kinevo 900(可视化系统)进行全面评估,并将其性能与先前的Zeiss手术显微镜模型进行了比较。这项研究是在神经外科研究实验室中进行的。评估涵盖了机器人,外观,内窥镜和荧光功能。研究发现,Kinevo 900比以前的手术显微镜提供了许多改进:
机器人技术
发现整合到Kinevo 900中的几种新型机器人功能提供了改进的人体工程学,并有可能提高神经外科手术的观看质量,包括照明和可视化。例如,发现Kinevo 900的“位置”和“ PointLock”功能可能有助于需要小骨窗的程序。此外,无需不断调整手术过程中微观可视化的参数。考虑到多达40%的总手手术持续时间用于调整显微镜,这项技术可以减少手术时间。
集成的外观可视化
发现Zeiss Kinevo 900的3D 4K数字混合可视化与先前的技术相比是一个重大改进。通过外观可视化模式和较长的工作距离,整个手术室团队都可以欣赏手术走廊深度的详细结构。此外,3D宽屏外观观点增加了教育价值。该研究发现,当Kinevo 900用作3D视图的外观外观时,可以进行微血管缝合和其他显微外科操作是可行的。
广告

广告


荧光可视化
Kinevo 900比先前的Zeiss系统发现的其他值得注意的改进包括改进的术中荧光可视化。Kinevo 900通过对脑和血色的感知显着改善,提供了荧光信号和周围区域之间更好的区分。与先前的系统相比,通过Kinevo 900数字显示,非荧光组织的颜色更明亮,更自然,并且通过眼部略微亮。
Kinevo 900提供了一种新颖的增强现实ICG覆盖函数,更好的图像分辨率以及与先前的Zeiss系统相比,用于量化流量的后处理工作流程。流动800在临床上有益于检测缺血性脑区域,进料器的分化和静脉畸形中排水血管的分化以及微施症通风的定量评估。这项研究表明,即使在小于1 mm的小血管中,ICG血管造影也足够敏感,可以评估血流,并具有相似的定量结果。
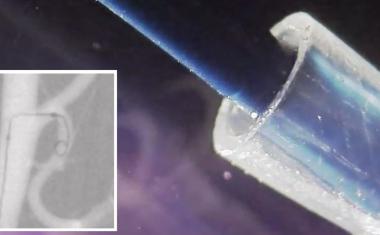
综合内窥镜微型检查工具
显微镜操作的颅内手术中的内窥镜辅助提供了深层结构的额外可视化。但是,与使用手术显微镜相比,内窥镜辅助受到可操作性的减少或至少显着的障碍。Kinevo 900是一个机器人可视化平台,可巩固微观和外镜可视化与微型启动角度内窥镜的整合。这种完全集成的微型检查工具QEVO允许检查切除腔周围的区域。以图片格式的两种视图的组合可以使执行内窥镜辅助程序的更安全,有效的方法
微型检查工具,QEVO启用了识别盲点以分辨出海绵状畸形的隐藏部分。术后成像证实了总切除术,并观察到患者在手术后一个月恢复到全强度。
总的来说,Kinevo 900中的改进以及完全集成的内窥镜微型检查工具非常重要。这些改进将影响外科手术程序的人体工程学,精度,效率,观看质量和教育价值,以表明外科医生在其最佳使用方面接受了合适的培训。
有关更多信息,请访问www.zeiss.com/kinevo
原始标题:机器人手术显微镜的实验室评估 - 神经外科的可视化平台
作者:Evgenii G. Belykh,Xioochun Zhao,Claudio Cavallo,Michael A. Bohl,Kaan Yagmurlu,Joseph L. Aklinski,Vadim A. Byvaltsev,Nader Sanai,Robert F. Spetzler,Michael T. Lawton,Peter Nakaji,Mark C. C.preul
资料来源:2018 Belykh等。Cureus 10(7):E3072。doi 10.7759/cureus.3072
资源:卡尔·蔡司Meditec