广告

广告

利兹大学机器人与自主系统教授彼得罗·瓦尔达斯特里(Pietro Valdastri)负责监督这项研究。他说:“结肠镜检查它为医生打开了一扇窗户,让他们了解隐藏在人体深处的世界,它在筛查大肠癌等疾病方面发挥着至关重要的作用。但几十年来,这项技术一直保持相对不变。我们开发的是一个系统,对医生和护士来说更容易操作,对病人来说更少痛苦。这标志着更广泛地应用结肠镜检查迈出了重要的一步——如果要及早发现直肠癌,这是至关重要的。”
由于该系统更容易使用,科学家们希望这能增加能够执行该程序的提供者的数量,并允许更多的患者接受结肠镜检查。结肠镜检查是检查直肠和结肠的程序。传统的结肠镜检查是通过一根插入肛门的半柔性管进行的,一些病人觉得这个过程非常痛苦,需要麻醉剂。
磁弹性结肠镜

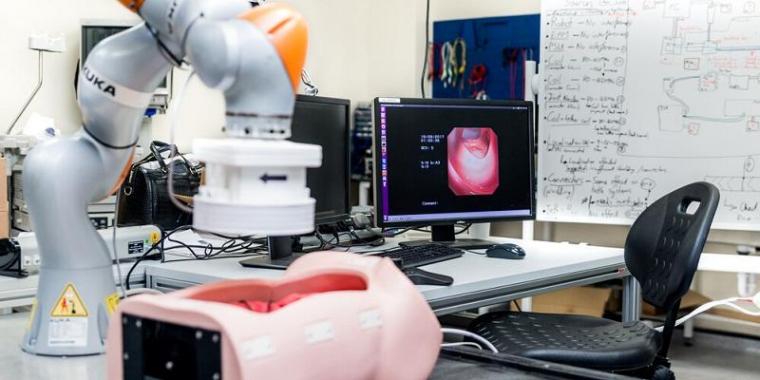
该研究小组已经开发出一种更小的胶囊状装置,它被拴在一根狭窄的电缆上,插入肛门,然后被引导到合适的位置——不是通过医生或护士推动结肠镜,而是通过放置在病人身上的机械手臂上的磁铁。
机械臂在操纵胶囊时围绕病人移动。这个系统是基于磁力相互吸引和排斥的原理。患者外部的磁铁与体内胶囊中的微型磁铁相互作用,引导其通过结肠。研究人员说,这将比传统结肠镜检查更少痛苦。
引导机械臂可以手工完成,但这是一项很难掌握的技术。作为回应,研究人员开发了不同水平的机器人辅助。这项最新研究评估了不同程度的机器人辅助在帮助非专业人员进行手术时的效果。
机器人辅助水平

- 直接控制机器人。在这里,操作者可以通过操纵杆直接控制机器人。在这种情况下,没有任何帮助。
- 智能遥控操作。操作者关注的是胶囊在结肠中的位置,让机器人系统计算将胶囊放入所需的机械臂的运动。
- 半自治的导航。机器人系统利用计算机视觉自动引导胶囊穿过结肠——尽管这可以被操作员重写。
在一次实验室模拟10名非专业工作人员被要求在20分钟内将胶囊送到结肠内的一个点。他们用三种不同水平的帮助做了五次。
使用机器人直接控制,参与者有58%的成功率。使用智能内窥镜远距操作,这一比例提高到96%,使用半自动导航的比例达到100%。
在实验的下一阶段,两名参与者被要求用常规结肠镜进入两只麻醉猪的结肠,然后在不同程度的帮助下用磁铁控制机器人系统重复这个任务。一名兽医在场以确保动物没有受到伤害。
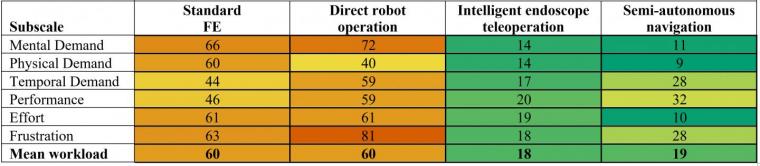
研究人员根据NASA任务负荷指数(NASA Task Load Index)对参与者的体力和脑力进行了评分。NASA的任务负荷指数显示,他们发现在机器人的帮助下操作结肠镜更容易。在操作传统结肠镜和参与者直接控制机器人时,挫败感是一个主要因素。
利兹大学的博士研究员詹姆斯·马丁是这项研究的共同负责人,他说:“操作机械臂是一项挑战。它不是很直观,这就阻碍了磁性可弯曲结肠镜的发展。但我们已经首次证明,将这一功能卸给机器人系统是可能的,让操作员考虑他们正在承担的临床任务,这将对人类的表现产生可衡量的差异。”
结肠镜检查的技术可以应用于其他内镜设备,如用于检查上消化道或肺部的设备。
利兹大学博士后研究员、该研究的联合负责人Bruno Scaglioni博士补充说:“机器人辅助结肠镜检查有可能彻底改变操作方式。这意味着进行检查的人不需要是操作设备的专家。这将有望使这项技术更广泛地应用,它可以在诊所和健康中心而不是医院提供。”
这项研究发表在自然机器智能.
来源:利兹大学