广告

广告

科学家一直在开发Millirobot或昆虫级机器人,这些机器人可以适应不同的环境以进行探索和生物医学申请。Shen博士的研究团队提出了一种简单的方法,可以通过涂上合成的胶状磁性喷雾剂(称为M-Spray)来构建Millirobot。“我们的想法是,通过穿上这款'磁性外套',我们可以将任何物体变成机器人并控制它们的运动。我们开发的M-Spray可以粘在目标对象上,并在由磁性驱动时“激活”对象菲尔德。”
M-Spray由聚乙烯醇(PVA),面筋和铁颗粒组成,可以粘附在一(1D),两个(1D),两个(2D)或三维(3D)物体的粗糙表面上,立即,稳定和牢固。它在表面上形成的膜厚度约为0.1至0.25mm,该膜足够薄,可以保留物体的原始尺寸,形式和结构。
在用M-Spray涂层物体后,研究人员用单个或多个磁化方向将其磁化,这可以控制对象如何通过磁场移动。然后他们在物体上施加热量,直到涂层固化为止。
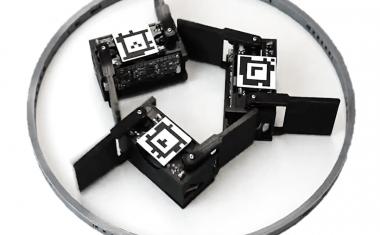
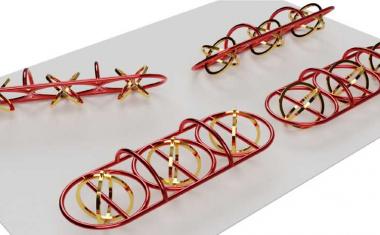
这样,当通过磁场驱动时,可以将物体转变为具有不同运动模式的毫动物,例如爬行,翻转,步行和滚动,从玻璃,皮肤,木材到沙子的各种表面上。该团队通过转换棉线(1D),演示了此功能折纸(2D平面),聚二甲基硅氧烷(PDMS)膜(2D弯曲/软表面)和塑料管(3D圆对象),以软爬行动物机器人,多英尺机器人,步行机器人和滚动机器人。

按需重新编程
使这种方法与众不同的是,团队可以按需重新编程Millirobot的运动模式。本文的联合第一作者杨Xiong先生解释说,通常,机器人的初始结构通常在构造后固定,从而限制其运动中的多功能性。但是,通过完全润湿固化的M-Spray涂层以使其像胶一样使其具有粘合剂,然后施加强磁场,可以更改M-Spray涂层的磁颗粒(易于磁化轴)的分布和对齐方向。
他们的实验表明,相同的millirobot可以在不同的运动模式之间切换,例如从宽敞的环境中的3D毛虫运动到更慢的2D琴琴运动,以通过狭窄的间隙。
导航能力和可崩溃的属性
此重编程的驱动功能也有助于导航目标。为了探索生物医学应用的潜力,该团队用导管进行了实验,该导管被广泛用于插入体内以治疗疾病或进行手术程序。他们证明了M-Spray涂层导管可以执行锋利或光滑的转弯。血液/液体流对运动能力和稳定性对M-Spray涂层导管的影响受到限制。
通过根据交付任务和环境重新编程棉线不同部分的M-Spray涂层,他们进一步表明,它可以实现快速速度并平稳地通过不规则的狭窄结构。Shen博士指出,从临床应用的角度来看,这可以防止在插入过程中出乎意料的喉咙壁下降。他说:“基于任务的重编程为始终需要导航的复杂食道,船只和尿道的导管操纵提供了有希望的潜力。”
该技术的另一个重要特征是,通过操纵磁场,可以按需将M-Spray涂层分解为粉末。Shen博士说:“ M-Spray的所有原材料,即PVA,麸质和铁颗粒都是生物相容性的。可以被人体吸收或排泄的解体涂层。”可以忽略不计。
在兔子胃中成功提供药物
为了进一步验证M-Spray启用Millirobot用于药物输送的可行性和有效性,该团队用兔子和带有M-Spray涂层的兔子进行体内测试。在分娩过程中,兔子被麻醉,胶囊在胃中的位置通过放射学成像。当胶囊到达目标区域时,研究人员通过施加振荡磁场来分解涂层。Shen博士补充说:“ M-Spray的可控崩解性能使该药物可以在有针对性的位置释放,而不是在器官中散射。”
尽管M-Spray涂层将在强烈酸性的环境下大约八分钟内开始分解(pH 1级),但团队表明,M-Spray涂层表面上的附加PVA层可以将其延长至大约15分钟。而且,如果用镍颗粒代替铁颗粒,即使在30分钟后,涂层也可以在强酸性环境中保持稳定。
“我们的实验结果表明,可以通过适应各种环境,表面条件和障碍的M-Spray来构建不同的Millirobot。我们希望这种施工策略可以有助于在不同领域的开发和应用,例如主动运输,可移动,可移动传感器和设备,特别是对于有限空间中的任务,” Shen博士说。
该研究发表在科学机器人技术。
资源:香港城市大学