预测何时以及如何收集机器人在科学和工程领域,粒子或动物变得有序仍然是一个挑战。在19世纪,科学家和工程师发展了统计力学这门学科,它预测了简单粒子群如何在有序和无序之间转变,就像一组随机碰撞的原子冻结形成统一的晶格一样。
更有挑战性的预测是,当粒子变得更复杂时,可以实现的集体行为,比如它们可以在自己的力量下移动。在鸟群中观察到的这种系统,细菌菌落和机器人蜂群——被称为“活动物质”。
一个由物理学家和工程师组成的团队提出了一种新的原理,通过这种原理,活性物质系统可以自发地进行有序排列,而不需要更高层次的指令,甚至不需要程序化agent之间的相互作用。他们已经在各种系统中证明了这一原理,包括被称为“smarticles”(智能活跃粒子)的周期性变形机器人群。
广告

广告

这一理论是由麻省理工学院的博士后研究员Pavel Chvykov提出的,他是杰里米·英格兰教授的学生,杰里米·英格兰教授现在是佐治亚理工学院物理学院的研究员。假设具有足够混乱动力学的特定类型的活跃物质会自发地发现研究人员所说的“低噪音”状态。
“当物质吸收能量并将其转化为随机运动时,就会发出咔嗒声,”英格兰说。“当运动更剧烈或更随机时,嘎嘎声会更大。相反,低噪音要么非常轻微,要么非常有组织——或者两者兼而有之。所以,这个想法是,如果你的物质和能量来源允许低噪音状态的可能性,系统将随机重新排列,直到它找到那个状态,然后被困在那里。如果你通过具有特定模式的力提供能量,这意味着所选择的状态将发现一种与该模式匹配的物质移动方式。”
为了发展他们的理论,英格兰和Chvykov从一种被称为热泳现象的灵感中得到启发,这种现象是由瑞士物理学家Charles Soret在19世纪末发现的。在Soret的实验中,他发现将一根管子里最初均匀的盐溶液置于不同的温度下,会自发地导致较冷地区盐浓度的增加——这与溶液的增加顺序相对应。
Chvykov和England开发了许多数学模型来证明低噪音原理,但直到他们与乔治亚理工学院邓恩家族物理学教授丹尼尔·戈德曼(Daniel Goldman)取得联系,他们才能够验证他们的预测。
戈德曼说:“几年前,我看到英格兰举办了一个研讨会,我想,我们的一些智能机器人可能对验证这一理论有价值。”博士生威廉·萨瓦伊(William Savoie)和阿卡什·瓦德汉(Akash Vardhan)与Chvykov合作,他们参观了高曼的实验室,用三个围在环内的扇动的smarticles来比较实验和理论。学生们观察到,机器人不会展示复杂的动力学,也不会完全探索容器,而是会自发地组织成几个舞蹈——例如,一个舞蹈是由三个机器人按顺序拍打彼此的手臂组成的。这些舞蹈可以持续数百次,但突然失去稳定性,被一种不同模式的舞蹈所取代。
“对于机器人群体来说,这是关于获得许多适应性和智能的群体行为,你可以设计成在单个群体中实现。”
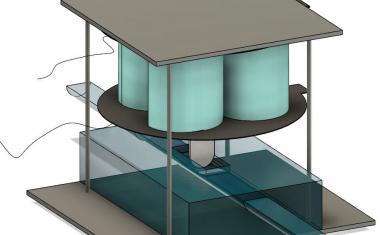
在首次证明这些简单的舞蹈确实是低响动状态后,Chvykov与西北大学的工程师Todd murphy教授和博士生Thomas Berrueta合作,他们开发了更精细和更好控制的smarticles。改良后的smarticles使研究人员能够测试该理论的局限性,包括不同的手臂拍打模式下舞蹈的类型和数量是如何变化的,以及这些舞蹈是如何被控制的。Berrueta说:“通过控制低噪音状态的序列,我们能够使系统达到有用的配置。”西北大学的研究人员说,这些发现可能对微型机器人群、活性物质和超材料有广泛的实际意义。
正如England指出的:“对于机器人群体来说,它是关于获得许多适应性和智能的群体行为,你可以设计成在单个群体中实现,即使单个机器人相对便宜和计算简单。对于活细胞和新材料,它可能是关于理解原子或蛋白质的‘群’可以给你带来什么,就新材料或计算特性而言。”
这项研究发表在杂志上科学.
来源:佐治亚理工学院