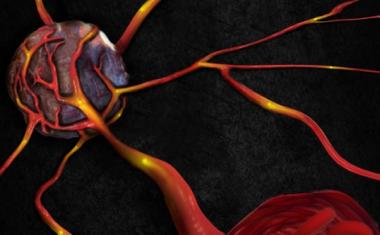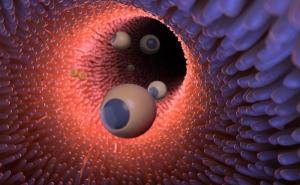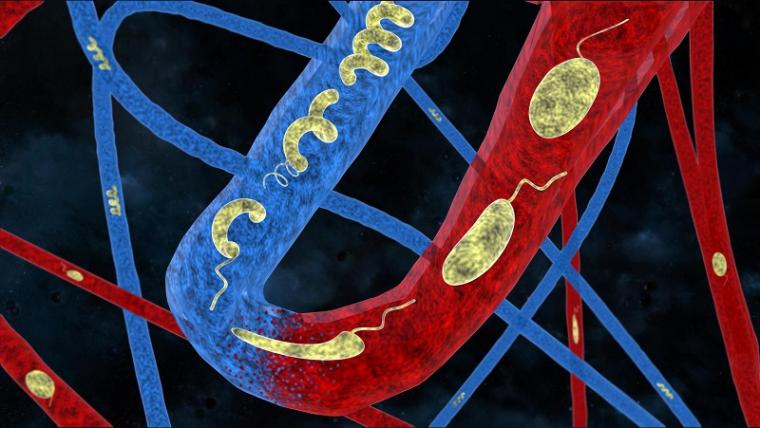
机器人在细菌和完全生物相容性后进行建模。
来源:EPFL / ETHZ
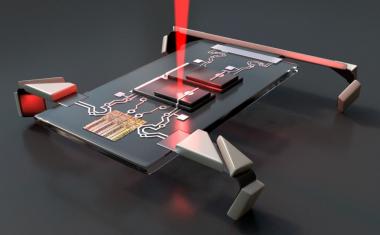
有一天,我们可以通过在EPFL和Eth苏黎世进行的研究进入患病的组织来摄取直接患有药物的微小机器人。这群科学家们 - 由Selman Sakar在Epfl and Bradley Nelson的LED在Eth苏黎世,从细菌中吸取的灵感来设计智能的生物相容性微机器,这是非常灵活的。因为这些设备能够通过流体游泳并在需要时改变它们的形状,因此它们可以通过窄血管和复杂的系统,而不会影响速度或机动性。它们由水凝胶纳米复合材料制成,其含有磁性纳米颗粒,允许它们通过电磁场控制。
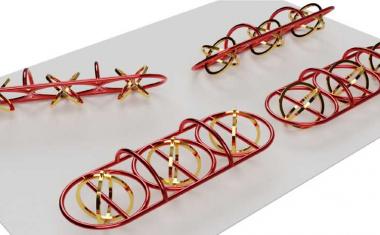
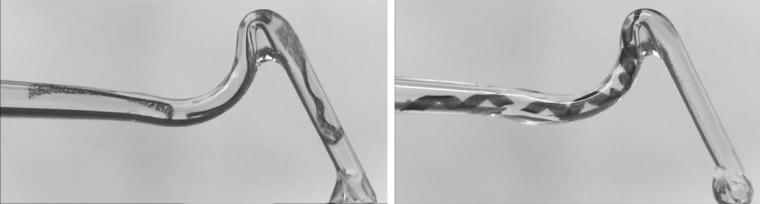
科学家们描述了他们开发的“编程”机器人形状的方法,这样它就可以轻松地通过密度大、粘性大或移动速度快的液体。
广告

广告

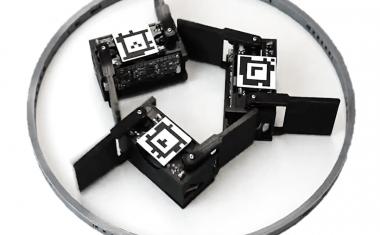
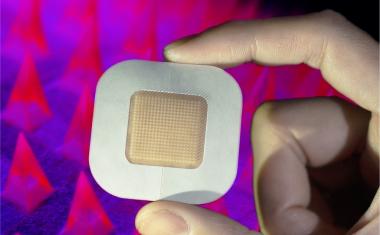
机器人可以根据周围环境改变形状。
来源:EPFL / ETHZ
体现了情报
当我们想到机器人时,我们通常会想到配备有复杂的电子设备,传感器,电池和执行器系统的庞大机器。但在微观规模上,机器人完全不同。
制造小型化机器人呈现出许多挑战,科学家使用基于折纸的折叠方法解决。他们的新颖运动策略采用了体现的智慧,这是由嵌入式电子系统执行的经典计算范例的替代方案。“我们的机器人具有特殊的组成和结构,使它们适应他们穿过的流体的特征。例如,如果它们遇到粘度或渗透浓度的变化,它们会改变它们的形状以保持其速度和机动性而不会失去对运动方向的控制,“Sakar说。
这些变形可以预先“编程”,以便在不使用繁琐的传感器或执行器的情况下最大化性能。可以使用电磁场来控制机器人,或者通过利用流体流动来控制它们自己的空腔。无论哪种方式,它们都会自动变成最有效的形状。