他们的解决方案是一个机器人平台,该平台利用临床磁共振成像扫描仪的超导磁体产生的边缘场来引导医疗器械通过更深更复杂的血管结构。
广告

广告

当一个研究人员“跳出框框思考”——字面上的意思
想象一下,你必须把一根像人的头发那么细的电线,在一个又长又窄、满是弯弯曲曲的管子里越推越深。铁丝缺乏刚性,加上施加在管壁上的摩擦力,最终会导致操纵不可能,铁丝最终会折叠起来,卡在管壁上。这正是外科医生面临的挑战,他们试图通过引导导线或其他仪器(如导管)通过狭窄、弯曲的血管网络,在人体更深的部位实施微创手术。
然而,有可能利用定向拉力来补充推力,抵消血管内的摩擦力,从而使仪器移动得更远。该装置的尖端被磁化,并在另一个磁铁的吸引力下沿着容器内部移动。只有病人身体外的一个强大的超导磁体才能提供所需的额外吸引力,使磁化的设备尽可能地转动。有一种现代医院设备可以做到这一点:核磁共振扫描仪,它有一个超导磁体,可以产生比地球强数万倍的磁场。
然而,核磁共振扫描仪隧道内的磁场是均匀的;这是如何进行患者成像的关键。这种均匀性带来了一个问题:为了让仪器的尖端穿过迷宫般的血管结构,引导磁场必须被调制到尽可能大的幅度,然后尽可能快地减小。
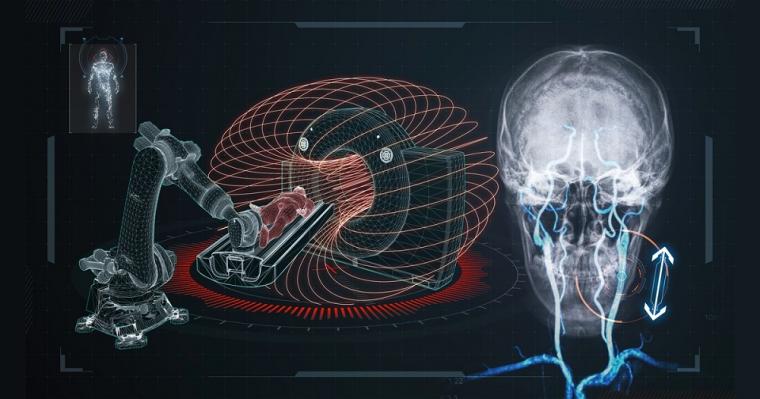
考虑到这个问题,马特尔教授想出了一个主意,不使用MRI机器隧道内的主磁场,而是使用机器外的所谓边缘磁场。他解释说:“MRI扫描仪的制造商通常会将边缘场减小到最小。”“结果是一个非常高振幅的场,衰减非常快。对我们来说,边缘场代表了一个极好的解决方案,它远远优于现有的最好的磁引导方法,而且它处于一个有利于人类尺度干预的外围空间。据我们所知,这是第一次MRI边缘场被用于医学应用,”他补充道。
移动病人而不是场地
要使仪器进入血管深处,不仅需要强大的吸力,而且这个吸力必须有方向,才能将仪器的磁头拉向血管内部的各个方向。由于核磁共振扫描仪的尺寸和重量,不可能通过移动它来改变磁场的方向。为了解决这个问题,患者被转移到核磁共振成像仪附近。马特尔教授的团队开发的这个平台使用了一个机器人工作台,它位于扫描仪旁边的边缘区域内。
这张桌子是由Arash azizi设计的。Arash azizi是这篇文章的第一作者,也是一位生物医学工程博士候选人,他的论文导师是martel教授。这台仪器可以自动改变方向和方向,使病人在仪器行进的过程中处于最佳位置,这要归功于一个系统,该系统可以绘制出MRI扫描仪磁场的方向力——马特尔教授称之为边缘场导航(FFN)的技术。
一项对FFN进行的体内x射线绘图研究表明,该系统能够高效、微创地操纵复杂血管结构深处的极小直径器械,迄今为止,使用已知的方法无法实现这些操作。
机器人拯救外科医生
这种机器人解决方案,大大优于手动程序和现有的基于磁场的平台,可以在人体非常深的区域进行血管内介入程序,因此目前无法进入人体的区域。
该方法有望扩大各种医疗程序应用的可能性,包括诊断、成像和局部治疗。除此之外,它还可以帮助外科医生进行尽可能微创的手术,包括治疗动脉瘤或中风等脑损伤。
来源:综合理工学院蒙特利尔