杰弗里·c·特林克尔一直对机器人手.尽管这可能还有很长的路要走,但已经研究机器人30多年的特林克尔说,他最感兴趣的是机器人能达到人类水平的“甚至更高”的“灵巧操作”的前景。
“我一直认为,机器人要想真正有用,就必须拾起东西,他们必须能够操纵它,把东西放在一起,修理东西,帮助你离开地面等等,”他说,并补充道:“要想解决这样的问题,需要很多技术领域的共同努力,很多人根本不在乎。”
但作为利哈伊大学(Lehigh University)计算机科学与工程系(Computer Science and Engineering Department)的教员和系主任,特林克尔(Trinkle)做的不仅仅是为它烦恼。他和他的团队正在从事的项目就涉及这样的技术挑战。其中一个项目是合作开发一种设计和建造软体机器人的新方法——这是人机合作的未来,特里克说,灵感来自于软体动物结构中自然肌肉的运动。想想:长颈鹿的舌头,章鱼的触手和大象的鼻子。计算机模拟是开发这种新方法的关键。
广告

广告

特林克和其他机构的同事共同撰写了一篇题为《展望》的论文美国国家科学院院刊认为“…经过良好验证的计算机模拟可以提供一个虚拟试验场,在许多情况下,有助于安全、更快、更低成本、更彻底地理解未来的机器人应该如何设计和控制,以实现安全操作和提高性能。”
“在此背景下,”作者继续说道,“我们将讨论模拟如何发挥作用机器人,以及消除其中一些障碍的潜在措施。”
本文总结了2018年美国国家科学基金会/国防部/国家标准与技术研究所专门针对该主题的研讨会上表达的观点。会议汇集了来自各种组织、学科和领域的参与者。作者说,这些专业知识来自机器人技术、机器学习和基于物理模拟的交叉领域。
作者总结道:“紧迫的问题是如何启动机器人模拟的交叉授粉过程,从而将努力从‘学术辩论’阶段迅速过渡到‘模拟技术构建和演示’阶段。这种转变可以通过持续10年的财政承诺来催化,这将确保为促进合作、竞争和有效模型和源代码的开放存储库的跨学科努力提供资金。正如航空航天和汽车行业所见证的那样,向数字化的范式转变虽然明显具有影响力,但却花了几十年时间才实现。从这一经验中学习,我们希望模拟技术能在几年而不是几十年内引领智能机器人的设计取得突破。”
推荐的文章

训练机器人的神经网络:就像婴儿学习爬行一样
Trink的软机器人项目是由耶鲁大学、华盛顿大学和布朗大学合作,由国家科学基金会资助的研究和创新资助新兴领域资助的项目。他的任务是利用数学模型以及搜索算法等计算机科学技术,开发“告诉”机器人如何移动的计算机系统。他提供了Roomba,一种自动在地板上移动的机器人真空吸尘器,作为一个可接近的例子。Trinkle说:“Roombas使用与我们使用的技术相同的技术,只是在一个非常简化的环境中。”。“Roombas知道有一堵墙。他们有一个内部地图,确保他们可以四处走动而不会撞到太多东西。”
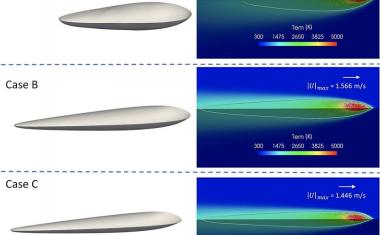
使用仿真工具,Trinkle应用数学模型来指导模拟的附肢围绕一个仿真物体(比如一个圆)弯曲,在三维空间中代表一个圆盘。
为了设计出最终指导三维机器人如何移动的“大脑”或“地图”,特林克尔使用了建立人工神经网络的技术机器学习这是模仿人脑的。这些神经网络在一个类似于人类学习的过程中通过数据进行训练。数据通过类似于“试错”的过程“训练”系统。在这种情况下,网络用计算机模拟一个抽象的象鼻生成的数据进行训练。
要让抽象的树干绕着圆圈旋转,并最终将圆圈移动到屏幕的另一部分,需要多个步骤,并在系统接受训练时进行大量的试验和错误。
Trinkle说:“[系统]什么都不知道,所以当它收紧一侧或另一侧的纤维时,它事先不知道它将如何移动,但神经网络将发现,如果它对肌肉纤维做某些事情,它将以某种方式移动。”。“在很长一段时间内,模拟将解决一些问题。它将尝试将磁盘推到正确的位置。”
他把这个过程比作婴儿学习爬行。“如果一个婴儿试图学习如何爬行,它会做一些不奏效的事情,最终婴儿会明白,”特林克尔说。“在某个时刻,突然之间,婴儿解决了问题,现在它会爬了,因为它的神经网络经过了经验的训练。”
在这项研究中,计算机模拟是团队将建立的机器人系统的训练基地。
推荐的文章

让机器人“更智能、更自主、更适应”
崔克和他的学生们进行实验来提取“地面真相”,或者直接观察到的信息输入到他们的计算机程序中。他们目前正在研究专为学术和工业研究设计的下一代轻型机械臂。特林克尔实验室的博士生兼研究助理崔金达(Jinda Cui)表示,这只手臂的一个关键特征是它有“7个自由度”,也就是7个独立控制的关节,使其在三维工作空间中具有更好的可达性。
“这个机器人有一个多余的关节,可以在不影响末端执行器的情况下运动,”崔说。
这是很重要的,因为它意味着,例如,机器人的抓取机制,或“手”,可以保持相同的姿势,即使其他“手臂”关节在运动。崔解释说,当环境很混乱,机器人需要做很多调整时,这一点特别有用。
不过,机器人的关节越多,控制起来就越困难。机器人的另一个优势是,团队可以访问直接控制关节运动的低级系统。崔说:“通过互联网或其他通信协议,我们可以直接与控制器通信,并告诉关节该做什么。”“我们可以单独调整关节的速度,甚至可以调整给特定关节的电流或扭矩。”
特林克尔和他的团队还建立了一个动作捕捉摄像机系统,类似于在电影中用电脑生成图像来绘制演员动作的系统。他们的系统是用来收集物体定位的数据,这些数据最终会通知他们的计算机程序。“如果这个机器人试图操纵什么东西,比如拿起你的手机,视觉系统应该能够跟踪你的手机在哪里,然后如果手机不在它预期的位置,机器人可以进行调整,”特林克尔说。
在未来,机器人将不再使用外部动作捕捉摄像机系统,而是内置传感器来跟踪物体的运动。
该团队的机器人已经安装了三维摄像机。在他们的实验中,崔克和崔计划添加其他探测器,比如触觉传感器,这对编程机器人注意变化的接触条件(如物体的滑度)很重要,然后能够根据它进行调整。“我们的工作,”崔说,“是让它更智能,更自主,更有适应性。”
推荐的文章

缩小仿真和实际机器人之间的“现实差距”
特林克尔指出,用模拟训练机器人的控制系统有其缺点。当在三维空间中尝试时,通常会有一个“现实差距”。人工神经网络,从模拟数据训练,一旦应用于物理机器人可能试图执行相同的任务,在模拟中失败。他说,这是因为从模拟数据中学习到的模型偏向于模拟的工作方式。
像Trinkle这样的机器人研究人员面临的挑战是开发一个实体模拟,然后在物理世界中进行一些测试,知道需要一些再培训。Trinkle说,希望研究人员只是做一些小的调整,这样它就可以在物理世界中工作,而不必重新开始整个过程。
换句话说,在开发这种教软机器人的新方法时,Trinkle将尝试在模拟中训练“婴儿”爬行90%的方法,然后让它在物理机器人上进行实验。
该团队计划建造三个完整的机器人系统作为测试原型,从模块化的电机单元,包括一个柔软的机器人手,可以抓取各种大小和形状的物体;树干状结构,具有静态底座,可前后、上下、左右抓取操作;还有一种像蠕虫一样的机器人,可以在有大障碍物的地形上自由移动。这些机器人可能会使用某种硅胶皮肤来创造一个更连续的接触表面。
“我们希望,在未来几年而不是几十年内,模拟技术将引领智能机器人的设计取得突破。”
至于机器人有一天能够抓握,特林克尔指出:“当我读研究生时,这是一个热门话题,然后它变冷了15年,然后又变热了。也许是因为解决了那么多其他的问题,而剩下的问题和抓握问题一样难,所以现在又有很多人在抓握。现在人工智能和神经网络已经变得如此庞大,人们正试图以各种不同的方式应用这些技术,因为这仍然是30年前的难题。”
尽管他认为在科学家解决让机器人像人类一样抓取抓取的技术挑战之前还有很长的路要走,但特里克承认,这些不是唯一需要克服的挑战。“有一些社会问题,比如:人们想要接近机器人吗?他们会成为朋友吗?”还有一些道德上的挑战需要应对。他以自动驾驶汽车为例。他问道,在困难的情况下,汽车的编程是为了拯救司机和乘客,还是为了拯救可能受到影响的过路行人?
“有很多不同类型的问题可供人们研究,”特林克补充道。“说到机器人,谁知道社会是否能接受它们,我们能在多大程度上推进这项技术。”
资料来源:利哈伊大学