在……的帮助下虚拟现实模型在美国,研究人员发现假体,即所谓的末端执行器的错误对齐,会导致可测量的性能损失。由来自波鸿市神经外科的克里斯蒂安·克勒斯博士领导的研究人员在《科学报告》杂志上发表了研究结果。
广告

广告

脑-机接口可以使严重瘫痪的病人移动假肢.在侵入式方法中,植入大脑的测量设备将神经细胞的信号转换为末端执行器的控制信号,例如机械臂假肢。基于波鸿的研究人员首先假设三个主要因素对末端执行器的控制有负面影响:解码误差、反馈误差和对准误差。
解码错误描述了患者真正的移动意图与解码器从大脑信号解码的移动意图之间的差异。当脑机接口的末端执行器相对于参与者的自然手臂的位置不正确时,就会发生对齐错误。脑机接口系统的反馈误差源于体感反馈的缺乏,即机器人手臂对触觉的反馈不足。波鸿的团队使用虚拟现实模型来分析失调和反馈错误-独立于解码错误,也独立于彼此。
“没有感觉运动障碍的健康研究参与者变成了运动障碍患者障碍该研究的主要作者Robin Lienkämper解释道。“因此,我们的模型提供了运动意图到末端执行器运动的一对一转换,可与患者使用完美解码器的转换相媲美。”
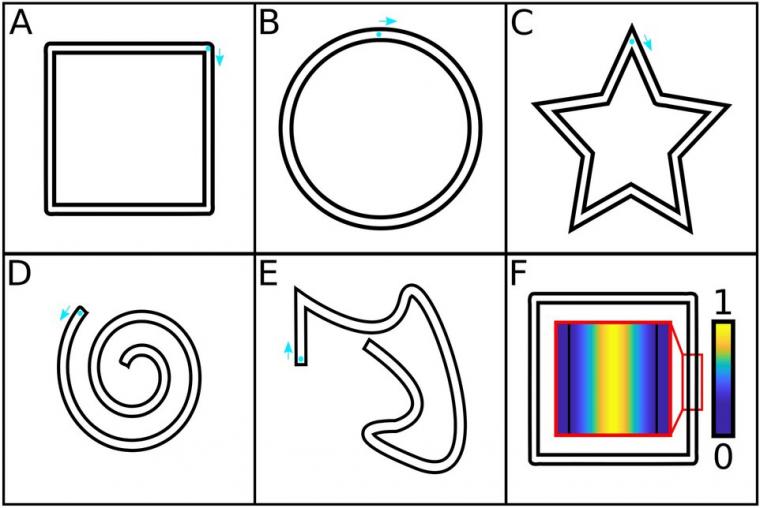
在虚拟现实中,参与者被要求用铅笔画出各种形状——正方形、圆形、星形、螺旋形和不对称的形状。这与脑机接口实验中经常设置的任务相对应,可以用来评估和比较不同条件下的运动表现。
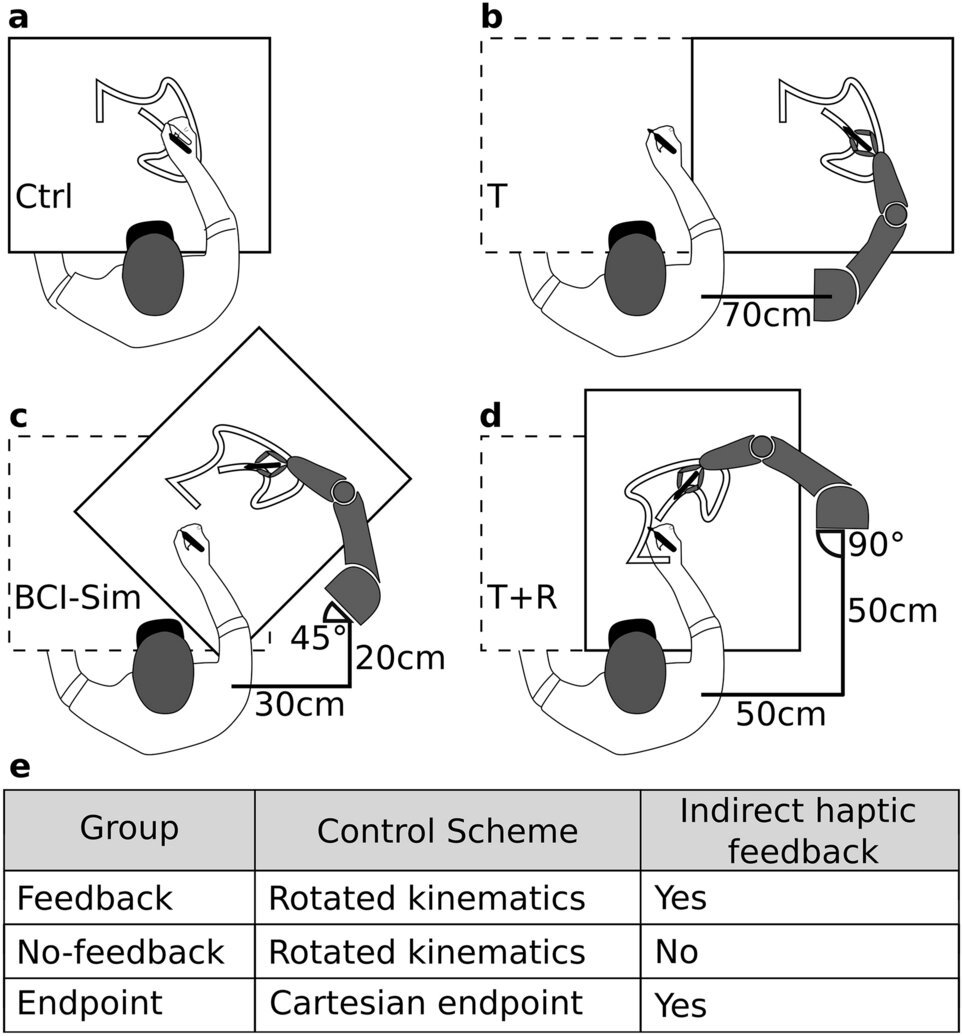
在实验中,被测试者将控制器视为一支笔。研究人员让测试者坐在真实的桌子旁,在虚拟世界中作画,控制器触摸桌子表面,从而达到了预期的反馈效果。有两组来控制效果:一组接受间接触觉反馈,另一组不接受。这意味着,对于第二组,物理表被删除,而表在虚拟现实中仍然可见。
研究小组利用整理后的数据表明,缺乏间接触觉反馈本身的影响很小,但放大了错位的影响。基于这些结果,研究人员还提出,一个自然位置的假体可以显著提高具有侵入性脑机接口的患者的表现。他们还假设,将机械臂固定在病人自己的身体意识上将会有积极的效果,并提高运动性能。理想情况下,使用脑-机接口的病人将把机械臂纳入自己的身体图式。
研究人员通过强调开发末端执行器的重要性来总结他们的研究,以使更好的融合和更自然的定位。他们认为,应该考虑外骨骼或功能性肌肉刺激等解决方案。罗宾Lienkämper说:“现在研究的未来在于利用工程学将科学结果带给病人。”他预计,由于该行业的承诺,适合日常使用的应用程序将在5到10年内出现。