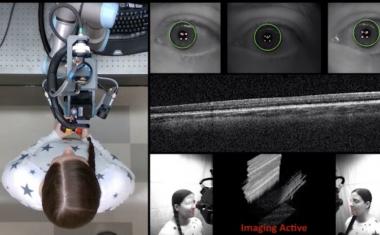
该系统可以帮助那些没有操作复杂机器人系统经验的人,使复杂的机器人更有用。研究参与者使用标准的辅助计算机接入技术与机器人界面进行交互,如眼睛追踪器和头部追踪器,他们已经使用这些技术来控制他们的个人电脑。
这篇论文报道了两项研究,展示了这种“机器人身体替代品”——可以执行与人类类似的任务——如何改善用户的生活质量。这项工作可以为开发更快、更有能力的辅助机器人奠定基础。“我们的研究结果表明,有严重运动障碍的人可以使用机器人身体代理来改善他们的生活质量,”乔治亚理工学院(Georgia Institute of Technology)博士研究生菲利普·格赖斯(Phillip Grice)说。“我们已经迈出了第一步,让人们可以购买合适类型的机器人,在家里使用它,并从中获得真正的好处。”
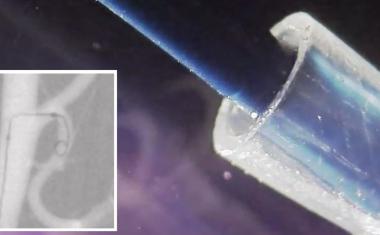
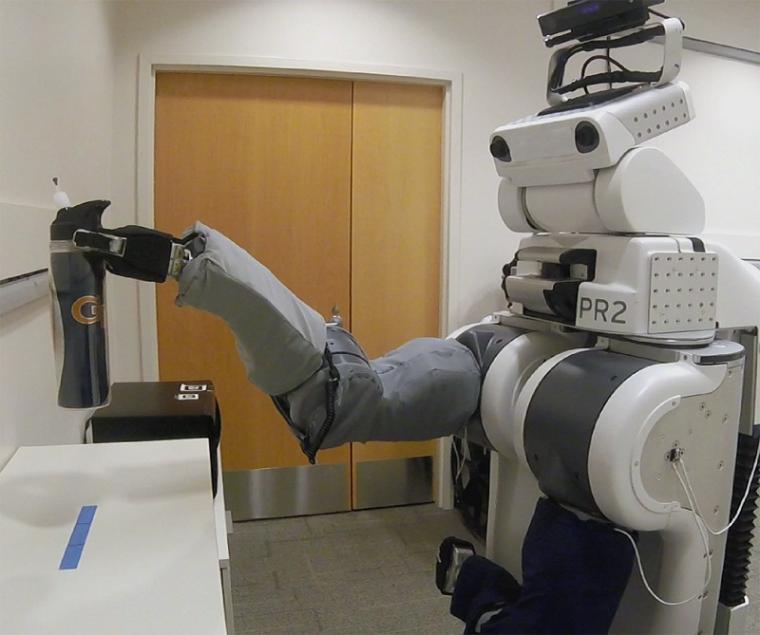
Grice和来自乔治亚理工学院和埃默里大学的Wallace H. Coulter生物医学工程系的Charlie Kemp教授在这两项研究中使用了Willow Garage公司制造的PR2移动机械手。这款轮式机器人有20个自由度,有两只手臂和一个“头”,可以操纵水瓶、毛巾、发刷甚至电动剃须刀等物体。肯普说:“我们的目标是让有限使用自己身体的人能够接触到机器人身体,这样他们就能以新的方式与世界互动。”
在他们的第一项研究中,格赖斯和肯普通过互联网向15名患有严重运动障碍的参与者提供了PR2。参与者学会远程控制机器人,使用他们自己的辅助设备操作鼠标光标来执行个人护理任务。80%的参与者能够操纵机器人拿起一个水瓶,并把它送到人体模型的嘴里。格赖斯说:“与健全人相比,机器人的能力是有限的。”“但与没有机器人的情况相比,参与者能够有效地执行任务,并在一项衡量他们操纵物体能力的临床评估中显示出了进步。”
广告

广告


在第二项研究中,研究人员将PR2和接口系统提供给了加州男子亨利·埃文斯(Henry Evans),他自2011年以来一直在帮助佐治亚理工学院的研究人员研究和改进辅助机器人系统。埃文斯,他已经非常有限的控制他的身体,检测机器人在家里七天,不仅完成了任务,还设计了新颖的使用结合操作机器人手臂的同时,用一只手臂来控制毛巾和其他使用刷子。埃文斯说:“这个系统对我来说非常解放,因为它使我在中风后第一次能够独立地操纵我的环境。”“对于其他人来说,当Phil和另外15个人客观地测试这个系统时,我很高兴看到他得到了压倒性的积极结果。”
研究人员很高兴埃文斯为机器人开发了新的用途,以他们没有预料到的方式结合了两个手臂的运动。格赖斯说:“当我们让亨利免费使用机器人一周时,他发现了我们没有预料到的使用机器人的新机会。”“这很重要,因为今天可用的许多辅助技术都是为非常特定的目的而设计的。Henry所展示的是,这个系统在提供帮助和授权用户方面是强大的。这方面的机会可能非常广泛。”
这个接口让埃文斯可以在床上照顾自己很长一段时间。埃文斯说:“这个界面系统最有用的地方是,我可以完全独立地操作这个机器人,只需要用一个非常直观的图形用户界面做很小的头部动作。”
这个基于网络的界面可以通过机器人头部的摄像头向用户展示世界的样子。视图上覆盖的可点击控件允许用户在家中或其他环境中移动机器人,并控制机器人的手和手臂。例如,当用户移动机器人的头部时,屏幕上就会显示鼠标光标作为一对眼球,显示用户点击时机器人将会看向何处。点击机械手周围的圆盘可以让用户选择一个动作。当驾驶机器人在房间里四处走动时,界面上光标后面的线条指示它将移动的方向。
围绕一个简单的单按钮鼠标的操作构建界面,允许各种残疾的人使用该界面,而无需进行冗长的培训。格赖斯指出:“拥有一个让各种身体缺陷的人都可以操作的界面,意味着我们可以为各种各样的人提供服务,这是一种通用的设计形式。”“由于它的功能,这是一个非常复杂的系统,所以我们必须克服的挑战是让对自己身体控制非常有限的人也能使用它。”
虽然这项研究的结果证明了研究人员已经开始着手做的事情,但坎普同意可以做出改进。现有的系统速度很慢,用户的错误可能会造成重大的挫折。不过,他说,“人们今天就可以使用这项技术,并真正从中受益。”
Evans建议,PR2的成本和体积需要显著降低,才能使该系统具有商业可行性。坎普说,这些研究为一种新型的辅助技术指明了方向。“看来plausibl
来源:佐治亚理工学院