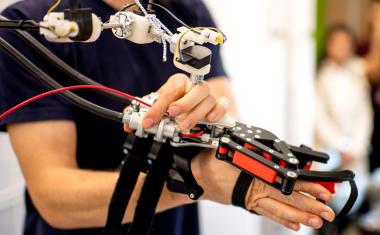
使用一个逼真的模型,该团队证明了外科手术机器人不仅可以通过尿道切除前列腺和组织,还可以完成将膀胱与尿道缝合这一困难的步骤。
一个典型的激进前列腺切除术,这是标准的治疗方法前列腺癌,需要穿过腹部到达前列腺。这切割和暴露的健康组织神经可能会导致一些接受手术的患者失禁和勃起功能障碍。目前没有其他选择内窥镜移除技术,因为没有现成的工具可以在这么小的范围内让手术变得灵活。
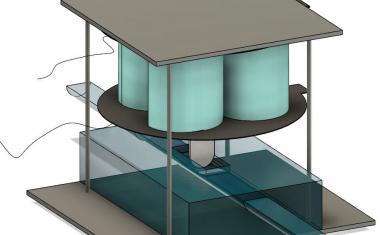
罗伯特·韦伯斯特,理查德·a·施罗德机械工程教授,医学和泌尿学副教授,致力于开发同心管机器人这使得通过内窥镜的灵巧性成为可能。他和泌尿科、生物医学和机械工程教授杜克•赫雷尔(Duke Herrell)开发了一种手术机器人平台,该平台的两只手臂由可伸缩的针头大小的管子制成,通过软件控制技术进行操作。
广告

广告

在它于2005年发明之后,韦伯斯特和现在的赫雷尔,以及范德比尔特大学的研究人员团队,包括泌尿科助理教授尼克·卡弗西、研究生多米尼克·罗佩拉、博士后学者埃尔纳尔·阿马诺夫和同事纳伦·尼玛格达,进一步开发了机器人原型,使其成为一种可用的工具,可以在尿道内工作,它的直径不到一英寸。
韦伯斯特说:“我们一直试图解决的最大挑战是尿道的大小。”韦伯斯特也是美国医学工程与发现实验室的一名院士。“在这种尺寸的区域缝纫是一个非常技术上的挑战。我们在如此小的规模上工作,没有其他仪器可以可靠地完成这个过程。”
推荐的文章
通过尿道切除前列腺后,外科医生可以操纵同心管机器人将尿道精确地缝合到膀胱颈部。这一过程被称为吻合,是最具挑战性的步骤之一,对恢复泌尿功能至关重要。Herrell和Webster还认为,保持周围结构完好,包括支持性功能的韧带和神经,减少创伤和牵引,将降低手术并发症的发生率。
在手术过程中,一个刚性内窥镜将两个同心管操作臂带入尿道。一旦送出,针臂刺穿并通过组织拉出缝线。第二只手臂抓住缝合带回到膀胱。韦伯斯特解释说,手术的吻合部分在7到8针之内就完成了。韦伯斯特同时还是电子工程、神经外科和耳鼻喉头颈外科的教授。
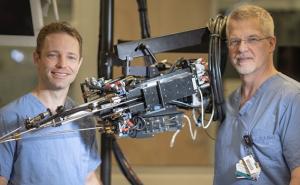
对于这项技术的发展,韦伯斯特说:“正是外科医生和VISE的工程师之间计划外的互动,使我们的工作有了很大的不同。这个想法的起源是Herrell大声地想知道,如果他使用的激光被添加到我们的机器人设备中,然后设备缩小到符合标准的内窥镜轮廓,会发生什么。VISE为这种头脑风暴式的互动提供了很多便利,而头脑风暴式的互动正是变革性新想法的萌芽。”
未来,MEDLab将继续试验该程序及其在缝合体内其他微小区域的适用性。
这项研究发表在杂志上电气和电子工程师学会.
来源:范德比尔特大学