大约有100万受伤或年龄相关残疾的美国人需要有人帮助他们吃饭。现在,由NIBIB资助的工程师们已经教会了一个名为ADA的机器人,也就是它的“辅助灵巧手臂”,如何用叉子捡起食物,并小心翼翼地将食物送到人的嘴里。
Siddhartha Srinivasa,博士,华盛顿大学计算机科学与工程学院的波音教授,被称为充满激情的机器人,他们建立了完整的机器人系统,整合了感知,规划和控制来执行实际功能现实世界。目前,Srinivasa和他的团队已经转向帮助美国的百万左右的个人需要有人帮助他们吃饭。
“我们支持该小组在理解用户意图的基础上开发轮椅控制系统的出色工作。这篇论文描绘了一幅很好的画面,从工程的角度来看,需要考虑参数来开发一个喂养机器人,”Grace Peng博士说,NIBIB项目的数学建模、仿真和分析主任。
在Ada的设计中,工程师意识到他们必须从头开始。在这种情况下,地面为零是叉上的食物。他们开始看,测量和编目人们如何做到。对培训的工程师来说并不令人惊讶,根据包括草莓,香蕉片,甜瓜立方体,芹菜条和婴儿胡萝卜的食物的大小,形状,僵硬,柔韧性和其他物理性质,采用不同的歪曲策略。
广告

广告

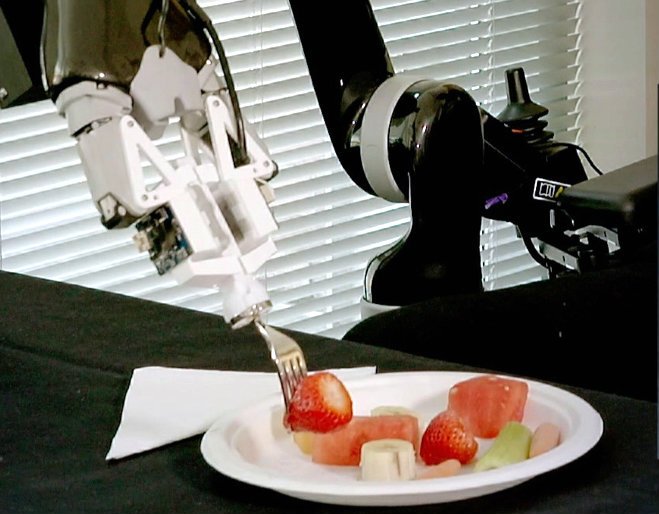
该团队使用人们使用的策略中收集的数据来利用不同的食物来编程ADA,以准确地识别板上的每个项目,然后执行导致每个项目成功围绕每个项目并将其传递给接收者口的最佳运动。例如,与草莓不同,这是一个坚固的草莓,一块香蕉的柔软性需要一定角度绕过围绕以避免只需滑下叉子的件。
芹菜条需要一种特定的方法,适合围绕和正确地将食物送到嘴。机器人被教导将叉子粘在条带的一端,然后抬起并转动件,使芹菜的相对端,透明叉的尖锐的尖头,被干净地呈现给接收者。
该集团的工作旨在帮助无法更独立地实现基本任务的人。Srinivasa说,“我们认为我们的技术可以帮助那些依赖护理人员每天喂养它们,以重新获得一些独立和控制自己的生活。”
除了这个重要的目标,斯里尼瓦萨指出,ADA还可以帮助经常负担过重的看护者,在这种情况下,他们可以设置好食物和机器人,然后处理其他任务或专注于与客户社交。“通过这种方式,我们将ADA视为护理者和他们的客户的双赢,最终将改善每个参与者的体验——特别是随着国家人口老龄化和对护理策略优化需求的增加。”